車の最新技術
更新日:2021.12.02 / 掲載日:2021.12.02
日産 月面探査車の試作機を公開 JAXAと共同研究
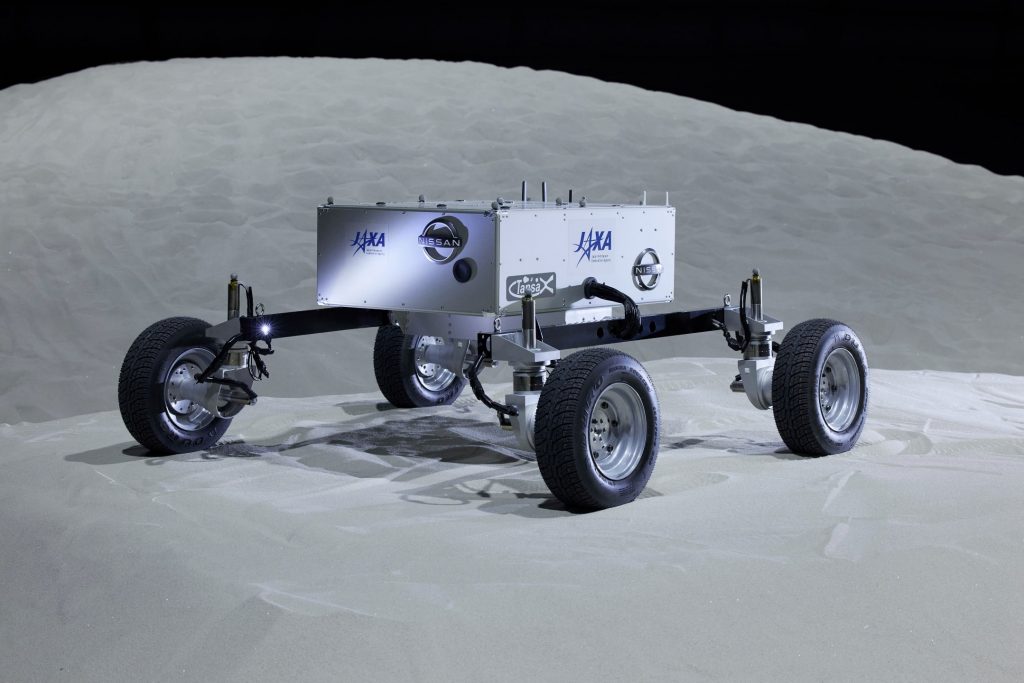
日産自動車は12月2日、日産グローバル本社ギャラリーで開催される「NISSAN FUTURES」において、国立研究開発法人宇宙航空研究開発機構(以下、JAXA)と共同研究を行っている月面ローバ(探査車)の試作機を公開した。
-
- 支払総額:248.8万円
- 車両本体価格:243万円
- 車種 : オーラ
- 年式 : 2024年
- 走行距離 : 2.8万km
- 車検: 検9.10
-
- 支払総額:159.8万円
- 車両本体価格:153.8万円
- 車種 : エクストレイル
- 年式 : 2019年
- 走行距離 : 8.0万km
- 車検: 車検整備付
-
- 支払総額:174.9万円
- 車両本体価格:167.5万円
- 車種 : ルークス
- 年式 : 2024年
- 走行距離 : 0.8万km
- 車検: 検8.9
-
- 支払総額:69.7万円
- 車両本体価格:64.9万円
- 車種 : ジューク
- 年式 : 2014後
- 走行距離 : 6.5万km
- 車検: 検9.11
-
- 支払総額:119.9万円
- 車両本体価格:111万円
- 車種 : セレナ
- 年式 : 2019年
- 走行距離 : 10.6万km
- 車検: 検8.7
-
- 支払総額:188.8万円
- 車両本体価格:186.2万円
- 車種 : エクストレイル
- 年式 : 2017年
- 走行距離 : 6.6万km
- 車検: 検8.10
-
- 支払総額:244.8万円
- 車両本体価格:239万円
- 車種 : オーラ
- 年式 : 2024年
- 走行距離 : 3.2万km
- 車検: 検9.10
-
- 支払総額:232.9万円
- 車両本体価格:223.4万円
- 車種 : セレナ
- 年式 : 2018年
- 走行距離 : 5.8万km
- 車検: 検9.5
-
- 支払総額:145.9万円
- 車両本体価格:136万円
- 車種 : セレナ
- 年式 : 2018年
- 走行距離 : 9.5万km
- 車検: 検9.11
-
- 支払総額:319.9万円
- 車両本体価格:310.9万円
- 車種 : スカイライン
- 年式 : 2019年
- 走行距離 : 2.9万km
- 車検: 検8.7
-
- 支払総額:329.8万円
- 車両本体価格:327.4万円
- 車種 : キャラバン
- 年式 : 2021年
- 走行距離 : 3.0万km
- 車検: 検8.11
-
- 支払総額:39.8万円
- 車両本体価格:31.2万円
- 車種 : モコ
- 年式 : 2016年
- 走行距離 : 7.3万km
- 車検: 検9.4
-
- 支払総額:329.9万円
- 車両本体価格:318.5万円
- 車種 : セレナ
- 年式 : 2023年
- 走行距離 : 3.0万km
- 車検: 検8.9
-
- 支払総額:172.9万円
- 車両本体価格:164.3万円
- 車種 : ノート
- 年式 : 2021年
- 走行距離 : 6.2万km
- 車検: 検8.5
-
- 支払総額:95.6万円
- 車両本体価格:89.8万円
- 車種 : エルグランド
- 年式 : 2015年
- 走行距離 : 10.4万km
- 車検: 車検整備付
-
- 支払総額:189.9万円
- 車両本体価格:180.9万円
- 車種 : キックス
- 年式 : 2021年
- 走行距離 : 3.3万km
- 車検: 検8.9
-
- 支払総額:194.8万円
- 車両本体価格:188万円
- 車種 : エクストレイル
- 年式 : 2017年
- 走行距離 : 4.9万km
- 車検: 車検整備付
-
- 支払総額:37.6万円
- 車両本体価格:34.8万円
- 車種 : ノート
- 年式 : 2014年
- 走行距離 : 3.0万km
- 車検: 検9.3
-
- 支払総額:79.9万円
- 車両本体価格:72.2万円
- 車種 : デイズルークス
- 年式 : 2017年
- 走行距離 : 5.8万km
- 車検: 検8.12
-
- 支払総額:384.9万円
- 車両本体価格:360.6万円
- 車種 : セレナ
- 年式 : 2025年
- 走行距離 : 6km
- 車検: 検10.8
-
- 支払総額:159.9万円
- 車両本体価格:149.5万円
- 車種 : ルークス
- 年式 : 2021年
- 走行距離 : 0.5万km
- 車検: 車検整備付
-
- 支払総額:116.9万円
- 車両本体価格:104.9万円
- 車種 : ノート
- 年式 : 2018年
- 走行距離 : 3.4万km
- 車検: 検9.3
-
- 支払総額:387.9万円
- 車両本体価格:363.6万円
- 車種 : セレナ
- 年式 : 2025年
- 走行距離 : 10km
- 車検: 検10.8
-
- 支払総額:339.9万円
- 車両本体価格:321.2万円
- 車種 : セレナ
- 年式 : 2024年
- 走行距離 : 3.8万km
- 車検: 車検整備付
-
- 支払総額:224.7万円
- 車両本体価格:219万円
- 車種 : セレナ
- 年式 : 2020年
- 走行距離 : 1.8万km
- 車検: 検9.6
-
- 支払総額:181.9万円
- 車両本体価格:173.2万円
- 車種 : ノート
- 年式 : 2023年
- 走行距離 : 2.4万km
- 車検: 検8.6
-
- 支払総額:128.4万円
- 車両本体価格:118万円
- 車種 : セレナ
- 年式 : 2016年
- 走行距離 : 4.2万km
- 車検: 車検整備付
-
- 支払総額:98.9万円
- 車両本体価格:93.8万円
- 車種 : セレナ
- 年式 : 2017年
- 走行距離 : 10.1万km
- 車検: 検8.8
-
- 支払総額:88.6万円
- 車両本体価格:79.9万円
- 車種 : セレナ
- 年式 : 2014後
- 走行距離 : 7.9万km
- 車検: 車検整備付
-
- 支払総額:109万円
- 車両本体価格:96万円
- 車種 : ノート
- 年式 : 2019年
- 走行距離 : 7.7万km
- 車検: 車検整備付
月面探査車をJAXAと共同研究
日本発の宇宙探査において新技術の開発を目指す、JAXA宇宙探査イノベーションハブ*1では、宇宙探査に必要な技術の一つとして月面ローバの研究が行われている。月面は砂地で覆われ、起伏に富んだ地形も多く、過酷な環境下にある。また、走行用のエネルギーも限られるため、月面ローバには高い走破性とともに高効率な走行性能が求められる。
日産は2020年1月から共同研究に参画。日産リーフなどの電気自動車の開発で培ってきたモーター制御技術と、日産アリアに搭載される電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAと共に研究を進めている。
*1: JAXA宇宙探査イノベーションハブの取り組みは、様々な分野の人材や知識を集めた組織を構築し、日本発の宇宙探査におけるGame Changing(現状を打破し、根本的にものごとを変えること)を実現する技術を開発することで、宇宙探査の在り方を変えると同時に、地上技術に革命を起こすことを目指したもの。
日産独自の技術「e-4ORCE」を月面ローバに応用
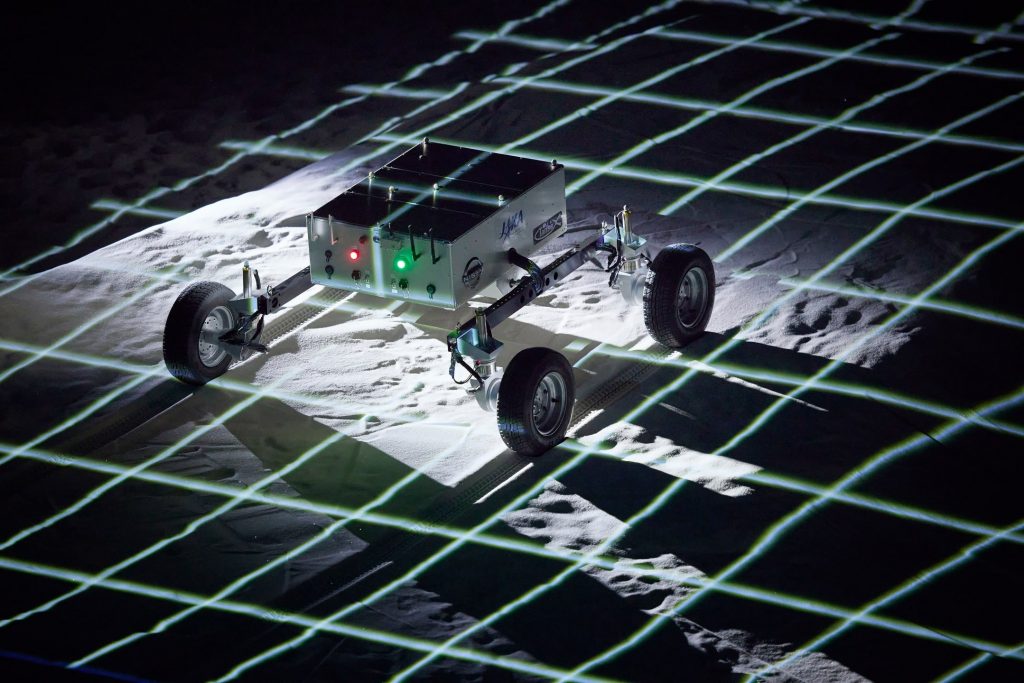
操縦安定性能を追求する日産は、電動駆動の4輪制御技術「e-4ORCE」を用いて、さまざまな環境下でも安定して運転できるだけでなく、車両姿勢を制御し乗り心地の向上に取り組んできた。JAXAとの共同研究では、この「e-4ORCE」を応用し、砂地などの過酷な環境下での走行性能を高める技術開発が行われている。
砂漠などの砂地をクルマが走行する際には、タイヤが空転し、砂に潜ることで脱出困難な状態(スタック)に陥ることがある。これを回避するためには、ドライバーがタイヤの空転量を繊細にコントロールする必要があるが、高い技量が求められる。
同研究では、路面状況に応じてタイヤの空転量を最小限に抑え、様々な路面環境において走行性能を高める駆動力制御の研究・開発が行われている。タイヤの空転量を最小限に抑えることは、砂地でのスタックを回避するだけでなく、空転によるエネルギーロスを最小化することにもなり、結果として走行エネルギーを効率化することにつながる。
日産は、過酷な環境下での走行性能を高め効率化する技術の開発は、月面ローバだけでなく、地上で走るクルマの走行性能も向上させるものとして取り組む。
この共同研究を通じ、テストカーの開発で得た日産の知見と、ローバの研究で得られたJAXAの知見を両者が共有することで、地上を走行するクルマと宇宙探査の両方で技術を進化させることを目指すという。

JAXA 宇宙探査イノベーションハブの船木 一幸ハブ長は、同研究について次のように述べた。「JAXAは、将来的に研究成果を宇宙探査へ応用することを目的としつつ、 地上での事業化/イノベーション創出の実現性や可能性がある課題に企業や大学・研究機関の方々と共同で取り組んでいます。様々な電動駆動技術ノウハウを持つ日産と共に研究を行うことで、より高性能な月面ローバの開発に応用できることを期待しています。」
また、日産でe-4ORCEの制御開発を担当している、先行車両開発部部長の中島 敏行氏は次のように語った。「月面という環境を想定したローバの共同研究に参加できることを非常にうれしく思っています。自動車の用途や走行シーンは様々であり、私たちが目指す究極の走行性能の研究開発を進めるにあたり、JAXAとの本共同研究で得られるノウハウは、地上における自動車のイノベーションにもつながると考えています。」
日産アリア「e-4ORCE」モデルは2022年夏以降の発売予定
「日産アリア」のe-4ORCEモデルでは、前後に合計2基の電気モーターを搭載。それぞれのトルクを個別にコントロールすることが可能で、加速時のトラクション性能はもとより、減速時も前後のモーターそれぞれで回生量を調整し、ブレーキ時のクルマの沈み込みを減少させるなどといった車体の揺れを抑える制御をおこなう。
またコーナリング時は、前後のモータートルクと4輪のブレーキを協調制御することで、ドライバーのステアリング操作に忠実で、滑らかなハンドリングを実現。これらの制御によって、ドライバーの技量によらず、濡れた路面や雪道などさまざまな道路環境下で安定した運転が可能となる技術だ。この技術が搭載される、日産アリアのe-4ORCEモデルは2022年夏以降の発売が予定されているという。
-
- 支払総額:159.9万円
- 車両本体価格:149.5万円
- 車種 : ルークス
- 年式 : 2021年
- 走行距離 : 0.5万km
- 車検: 車検整備付
-
- 支払総額:329.8万円
- 車両本体価格:327.4万円
- 車種 : キャラバン
- 年式 : 2021年
- 走行距離 : 3.0万km
- 車検: 検8.11
-
- 支払総額:224.7万円
- 車両本体価格:219万円
- 車種 : セレナ
- 年式 : 2020年
- 走行距離 : 1.8万km
- 車検: 検9.6
-
- 支払総額:109万円
- 車両本体価格:96万円
- 車種 : ノート
- 年式 : 2019年
- 走行距離 : 7.7万km
- 車検: 車検整備付
-
- 支払総額:88.6万円
- 車両本体価格:79.9万円
- 車種 : セレナ
- 年式 : 2014後
- 走行距離 : 7.9万km
- 車検: 車検整備付
-
- 支払総額:172.9万円
- 車両本体価格:164.3万円
- 車種 : ノート
- 年式 : 2021年
- 走行距離 : 6.2万km
- 車検: 検8.5
-
- 支払総額:37.6万円
- 車両本体価格:34.8万円
- 車種 : ノート
- 年式 : 2014年
- 走行距離 : 3.0万km
- 車検: 検9.3
-
- 支払総額:188.8万円
- 車両本体価格:186.2万円
- 車種 : エクストレイル
- 年式 : 2017年
- 走行距離 : 6.6万km
- 車検: 検8.10
-
- 支払総額:95.6万円
- 車両本体価格:89.8万円
- 車種 : エルグランド
- 年式 : 2015年
- 走行距離 : 10.4万km
- 車検: 車検整備付
-
- 支払総額:189.9万円
- 車両本体価格:180.9万円
- 車種 : キックス
- 年式 : 2021年
- 走行距離 : 3.3万km
- 車検: 検8.9
-
- 支払総額:174.9万円
- 車両本体価格:167.5万円
- 車種 : ルークス
- 年式 : 2024年
- 走行距離 : 0.8万km
- 車検: 検8.9
-
- 支払総額:119.9万円
- 車両本体価格:111万円
- 車種 : セレナ
- 年式 : 2019年
- 走行距離 : 10.6万km
- 車検: 検8.7
-
- 支払総額:194.8万円
- 車両本体価格:188万円
- 車種 : エクストレイル
- 年式 : 2017年
- 走行距離 : 4.9万km
- 車検: 車検整備付
-
- 支払総額:98.9万円
- 車両本体価格:93.8万円
- 車種 : セレナ
- 年式 : 2017年
- 走行距離 : 10.1万km
- 車検: 検8.8
-
- 支払総額:145.9万円
- 車両本体価格:136万円
- 車種 : セレナ
- 年式 : 2018年
- 走行距離 : 9.5万km
- 車検: 検9.11
-
- 支払総額:181.9万円
- 車両本体価格:173.2万円
- 車種 : ノート
- 年式 : 2023年
- 走行距離 : 2.4万km
- 車検: 検8.6
-
- 支払総額:319.9万円
- 車両本体価格:310.9万円
- 車種 : スカイライン
- 年式 : 2019年
- 走行距離 : 2.9万km
- 車検: 検8.7
-
- 支払総額:128.4万円
- 車両本体価格:118万円
- 車種 : セレナ
- 年式 : 2016年
- 走行距離 : 4.2万km
- 車検: 車検整備付
-
- 支払総額:384.9万円
- 車両本体価格:360.6万円
- 車種 : セレナ
- 年式 : 2025年
- 走行距離 : 6km
- 車検: 検10.8
-
- 支払総額:39.8万円
- 車両本体価格:31.2万円
- 車種 : モコ
- 年式 : 2016年
- 走行距離 : 7.3万km
- 車検: 検9.4
-
- 支払総額:159.8万円
- 車両本体価格:153.8万円
- 車種 : エクストレイル
- 年式 : 2019年
- 走行距離 : 8.0万km
- 車検: 車検整備付
-
- 支払総額:339.9万円
- 車両本体価格:321.2万円
- 車種 : セレナ
- 年式 : 2024年
- 走行距離 : 3.8万km
- 車検: 車検整備付
-
- 支払総額:329.9万円
- 車両本体価格:318.5万円
- 車種 : セレナ
- 年式 : 2023年
- 走行距離 : 3.0万km
- 車検: 検8.9
-
- 支払総額:248.8万円
- 車両本体価格:243万円
- 車種 : オーラ
- 年式 : 2024年
- 走行距離 : 2.8万km
- 車検: 検9.10
-
- 支払総額:387.9万円
- 車両本体価格:363.6万円
- 車種 : セレナ
- 年式 : 2025年
- 走行距離 : 10km
- 車検: 検10.8
-
- 支払総額:244.8万円
- 車両本体価格:239万円
- 車種 : オーラ
- 年式 : 2024年
- 走行距離 : 3.2万km
- 車検: 検9.10
-
- 支払総額:69.7万円
- 車両本体価格:64.9万円
- 車種 : ジューク
- 年式 : 2014後
- 走行距離 : 6.5万km
- 車検: 検9.11
-
- 支払総額:232.9万円
- 車両本体価格:223.4万円
- 車種 : セレナ
- 年式 : 2018年
- 走行距離 : 5.8万km
- 車検: 検9.5
-
- 支払総額:79.9万円
- 車両本体価格:72.2万円
- 車種 : デイズルークス
- 年式 : 2017年
- 走行距離 : 5.8万km
- 車検: 検8.12
-
- 支払総額:116.9万円
- 車両本体価格:104.9万円
- 車種 : ノート
- 年式 : 2018年
- 走行距離 : 3.4万km
- 車検: 検9.3
ライタープロフィール
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
![]() SHARE
SHARE
![]() SHARE
SHARE