車種別・最新情報
更新日:2021.06.02 / 掲載日:2021.04.22
自動運転レベル3対応!HONDA新型「レジェンド」が拓く新時代
近未来を舞台にした映画で走りまわる無人のクルマたち。おとぎ話と思っていた「自動運転」が、ついに身近なところまでやってきた。市販モデルとしてレベル3に初対応したレジェンドの見どころをチェックしていこう。

偉大なる一歩を刻むレベル3初対応の市販モデル
官民ITS構想・ロードマップ2017を基に作成された国土交通省の自動運転のレベル分けでは、レベル3に分類される条件付自動運転(自動パイロット)の導入目処を2020年としていた。今回その第1号となったのが、レジェンドに追加されたホンダセンシング エリートである。
従来のホンダセンシングには、高速道路走行中の渋滞追従機能を備えた全車速型ACCや、車線内の中央付近を維持するLKA、歩行者事故低減操舵補助、オートハイビームが備わっており、S660とNSXなどを除いた多くのホンダ車に採用されている。すでにホンダセンシングの基本機能でもACCとLKAの併用を代表的機能とする国土交通省策定のレベル2に該当する。これらの機能にホンダセンシング エリートは、高速道路での手放し走行を中心に一定条件下での自動運転化を図っていることが特徴だ。
第1のポイントは、高機能化レベル2に相当する高速道路でのハンズオフ(手放し)走行だ。稼働条件は高速道路で65km/h以上の走行。高精度地図やGPS/みちびきの情報を用いて自車情報を特定した状況では、システムの自動操舵が可能になる。逆にドライバーが操舵もしくはアクセル操作を行った場合は解除される。また、ブレーキ操作を行った場合はACCとLKAも解除されシステムは待機状態になる。要するに自動運転中はクルマに任せて、ドライバーは周辺状況を監視するのみである。運転の主体はシステムとなり、ドライバーはバックアップとして控えるわけだ。
ハンズオフ走行中は車線変更もステア操作を必要としない。ウインカーレバーを移動したい側に軽く押すだけ。車線変更が可能な場合はシステム稼働を示す確認音がすれば、車線移動に入る。
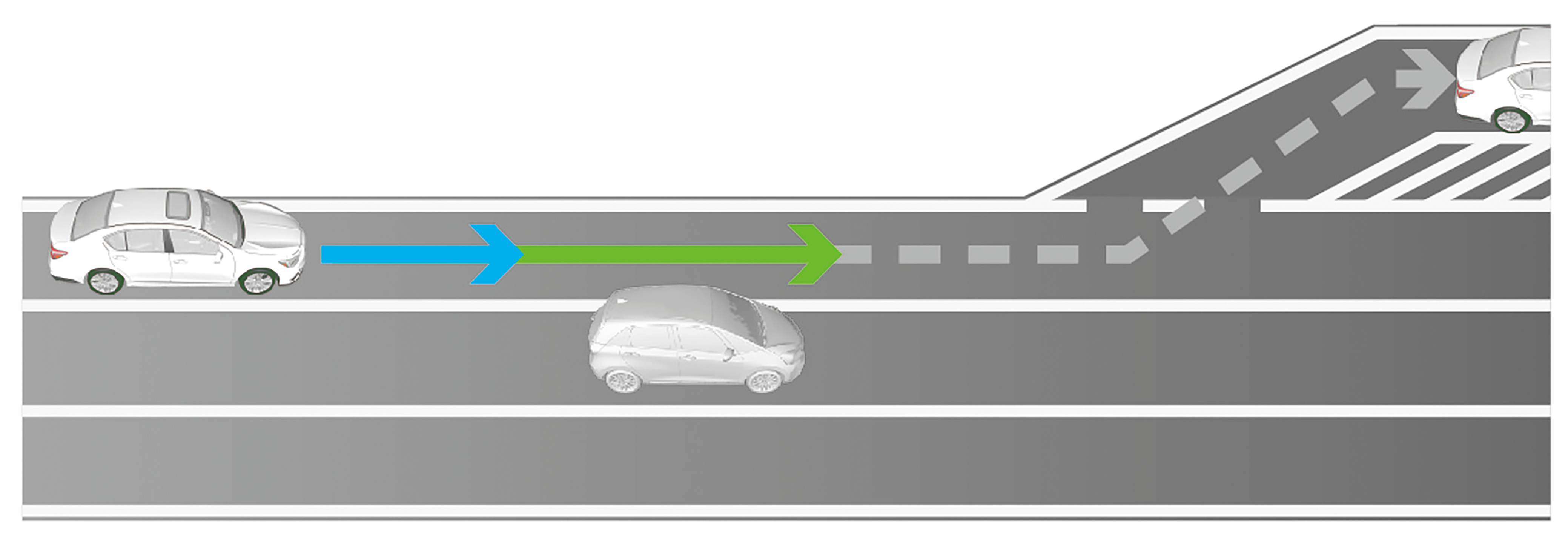
車線変更についてはもうひとつ、高度車線変更支援機能が設定されている。ステアリングの専用スイッチをオンにしておけば、ACCの設定速度より遅い前方車両に追い付いた時に自動的に追い越し、その後に元の車線に戻る。また、ナビのルートガイド中は目的地に向かう高速出口が近づくと、出口に向かって自動的に車線変更が開始される。うっかり出口を見過ごすということもなくなるわけだ。
ただし、前記した機能はいずれもドライバーの安全確認が前提であり、車間距離が短く密集した状況や急な割り込みなど安全確保が難しい状況ではシステムが解除される可能性もある。自動運転中でもドライバーは高速道路教習時の教官の目線が必要になる。それは即座に運転復帰をするために必須だからだ。
![]() 100台限定のリース車両として発売!運転支援機能が大幅にパワーアップした新グレード
100台限定のリース車両として発売!運転支援機能が大幅にパワーアップした新グレード

●レジェンド ハイブリッド EX ホンダセンシング エリート
リリースではフルモデルチェンジを謳うが、内実はレベル3対応モデルを追加した内容。しかもこの新設定グレードは、100台限定のリース専用モデルとなるので、一般ユーザーが手に入れるにはハードルが高い。法人向けのパイロットモデルとしての意味合いが強い。
■主要諸元 ●全長×全幅×全高(mm):5030×1890×1480 ●ホイールベース(mm):2850 ●車両重量(kg):2030 ●パワーユニット:3471ccV6SOHC(314PS/37.8kg・m)+ツインモーター(フロント:48kW/148Nm、リヤ:37kW/73Nm) ●WLTCモード燃料消費率 (総合モード):12.4km/L ●ブレーキ:ベンチレーテッドディスク(F)ディスク(R) ●サスペンション:ダブルウィッシュボーン式(F)ウィッシュボーン式(R) ●タイヤ:245/40R19


3次元の高精度地図や、全球測位衛星システム(GNSS)の情報を用いる高度な自動運行を実現することで、レベル3の条件付自動運転車(限定領域)に適合。レベル3初の市販モデルとして世に送り出される。
「ホンダセンシング エリート」現行レジェンドに3つの新機能を追加
<1>トラフィックジャムパイロット(渋滞運転機能)
【レベル3相当】運転はクルマのシステムが担当。ドライバーは監視者という立場に
運転支援機能(ハンズオフ状態)作動中に渋滞に遭遇すると、ドライバーに代わってシステムが運転を代行。運転の主体はクルマ側となり、ドライバーはシステムが正常に動いていることを確認する監視者になるため、運転に即時に復帰できる状態ならば、アイズオフが可能。ナビやスマートフォンの操作やテレビの視聴も許される。
●高速道路の本線走行時(ハンズオフ走行機能)
ACCとLKASが作動中に一定の条件を満たすとハンズオフ走行を開始。アクセル/ブレーキ/ステアリング操作はシステムが行うが、運転主体はドライバーのため、ナビの操作等は禁止される。(高性能化レベル2相当)
●高速道路の車線変更時(ハンズオフ走行機能)
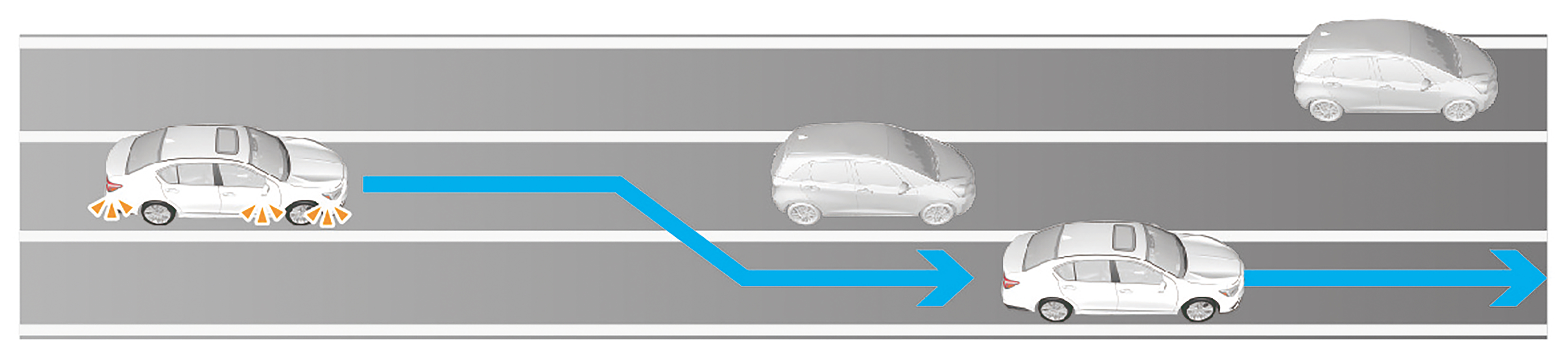
ハンズオフ走行中にウインカーを操作すると、システムが周辺状況をもとに車線変更の判断を行う。変更が可能と判断した場合は、滑らかかつ安定した挙動で車線変更を行う。(高性能化レベル2相当)
●高速道路の渋滞時(トラフィックジャムパイロット)
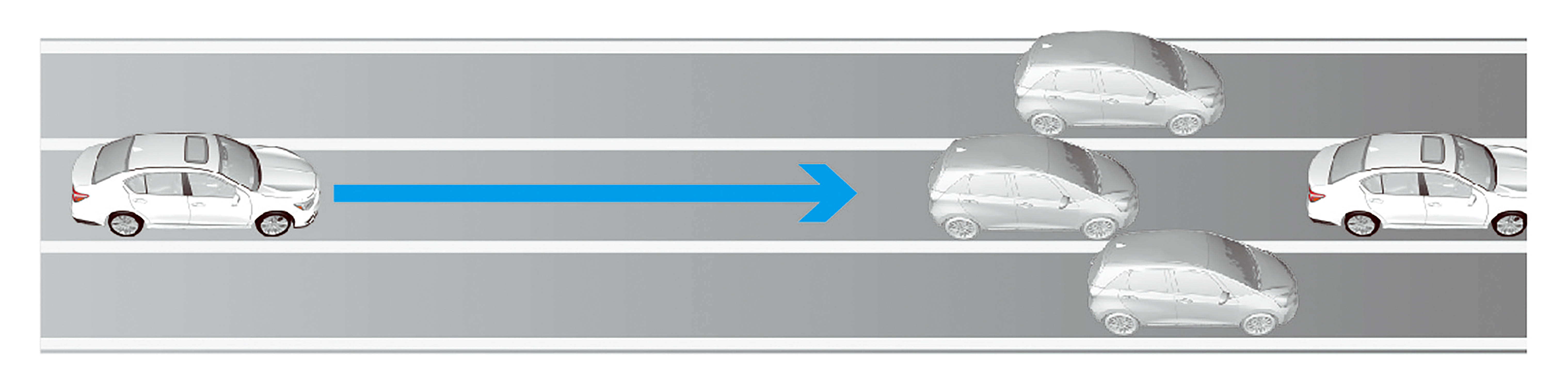
ハンズオフ走行中に渋滞に遭遇すると、トラフィックジャムパイロット(渋滞運転機能)に移行。運転制御はハンズオフ走行とほぼ同じだが、運転主体がシステム側になることが違い。(レベル3相当)
●高速道路の本線退出時(ハンズオフ走行機能)
ハンズオフ走行時にナビに目的地を設定していると、最寄りの分岐や出口付近に近づくと自動で近い車線に変更。その後、分岐や出口付近でドライバーに運転操作への復帰を要求する。(高速化レベル2相当)
<2>緊急時停車支援機能

路肩がある場合は、左側車線に向かって車線変更と減速、停車まで自動的に行う機能も備えている。
システムの指示に従わないと最終的には自動停車を行う
トラフィックジャムパイロットもしくはハンズオフ走行時に、システムがドライバーの運転復帰を判断すると、モニター表示や警告音、シートベルトを振動させて、ドライバーの操作要求を行うが、それでも操作に応じない場合は、自動でハザードランプやホーンを作動させながら減速・停車させる。
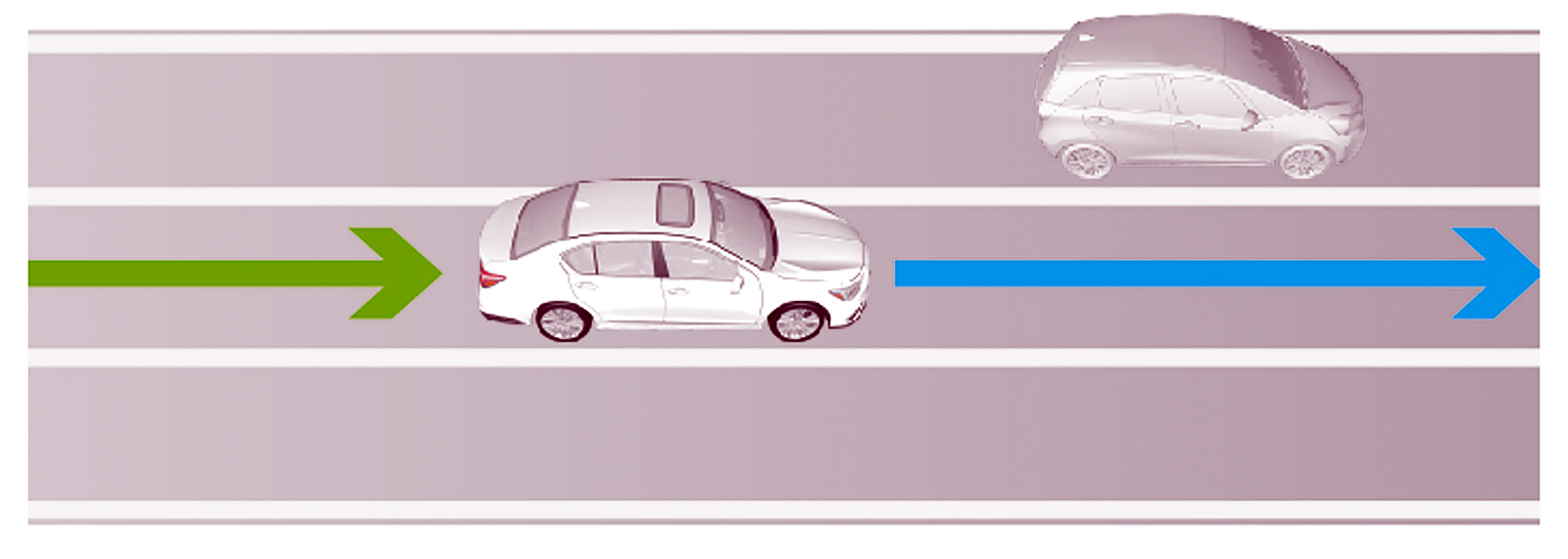
<3>ハンズオフ走行機能
【レベル2相当】走行中に条件を満たせば自動的に移行。車両の追い越しもシステムが担当
高速道路や自動車専用道でACCとLKAが作動中に一定の条件(走行65km/h以上、GPS信号の受信など)をクリアすると、自動的にハンズオフ走行に移行。設定された速度を保ちながら、車線中央に沿うように走行を行うほか、車線変更や車両の追い越しもドライバーへの告知ののち、システムが自動的に加減速と操舵を行う。
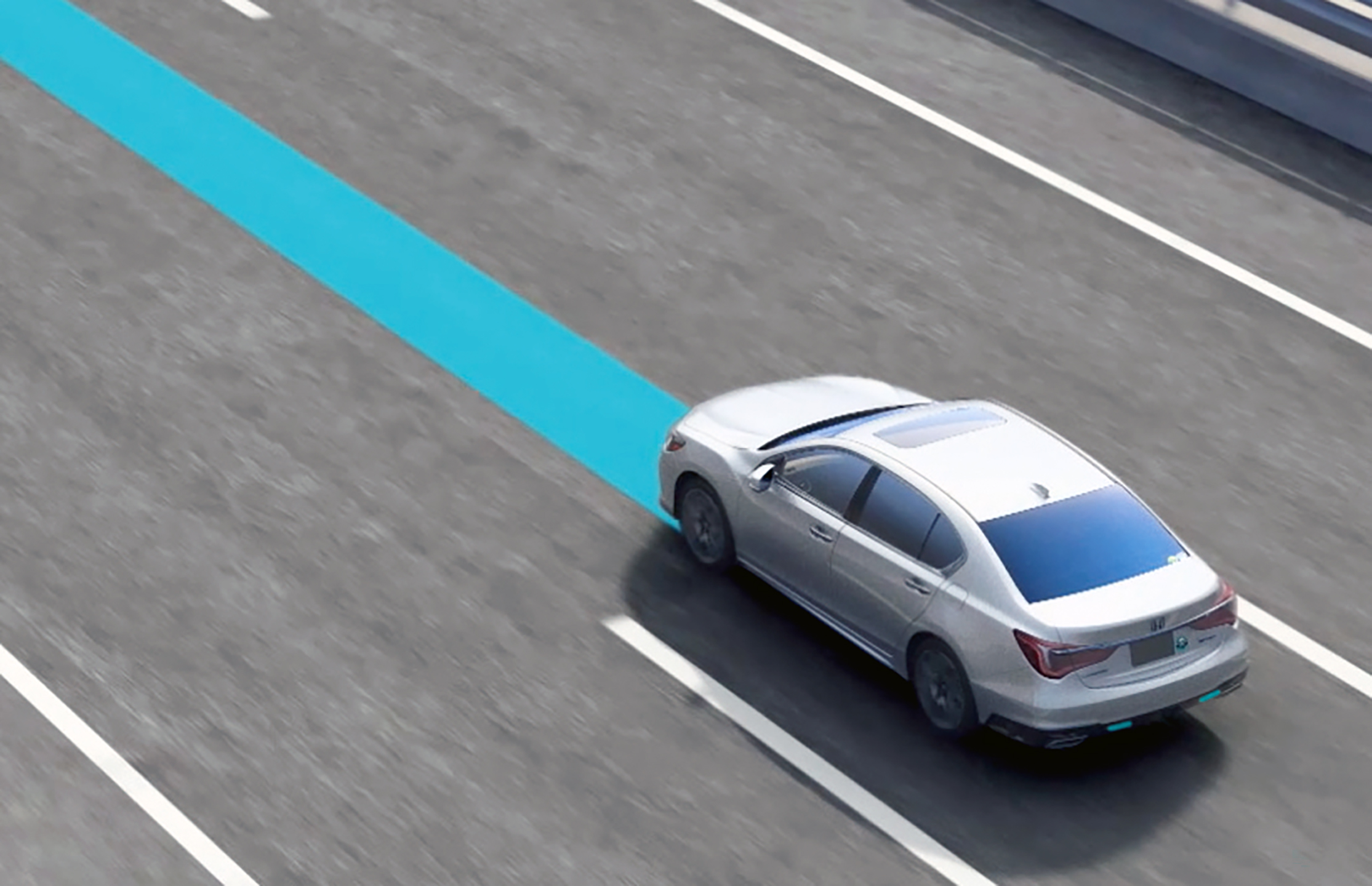
●車線内運転支援機能(ハンズオフ機能付)
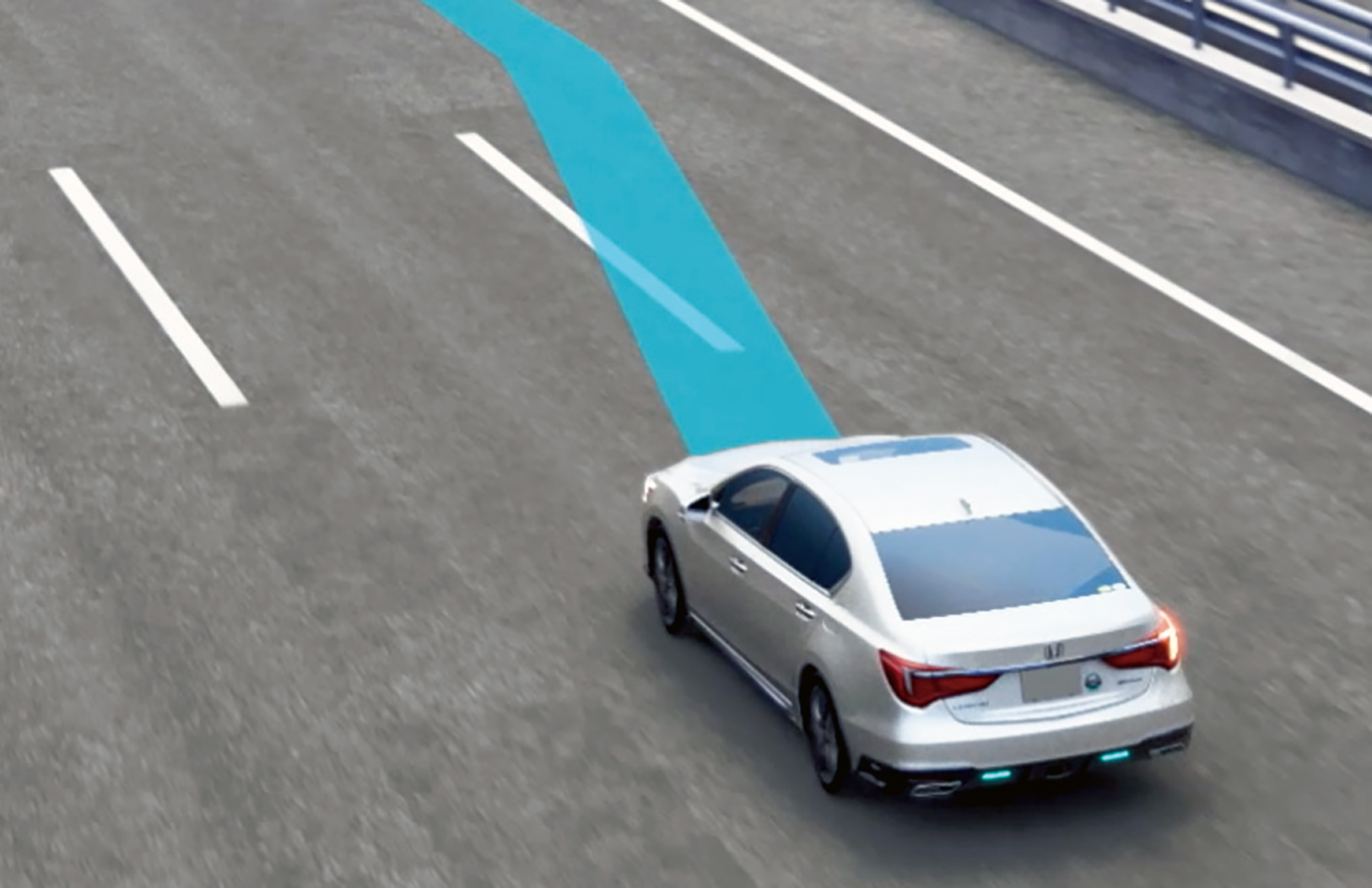
●車線変更支援機能(ハンズオフ機能付)

●高度車線変更支援機能(ハンズオフ機能付)
システムが運転する時代へのホンダの壮大な試金石
レベル3は凄い、これぞ自動運転と思わせる機能が「トラフィックジャムパイロット(渋滞運転機能)」である。この機能がレベル3の「条件付自動運転機能」に適合する機能になる。機能呼称が示すとおり、高速道路での渋滞中の完全自動運転が可能。システム作動中ならドライバーは周辺監視や安全確認を行う必要がなくなり、ハンズオフに加えて運転視界から視線を外し、TVの視聴や目的地設定のナビ操作、スマートフォンの操作だって可能になる。
作動条件は前車追従のハンズオフ走行中に走行速度が約30km/h以下。ハンズオフ走行から自動的に渋滞運転機能へ移行する。解除は走行速度が約50km/hを超えた時になり、運転操作への復帰が指示される。ドライバーが意図的に操舵やアクセル/ブレーキ操作を行った場合はACC/LKAの機能も解除されるので、再び使用するには復帰操作が必要になる。また、崩れたドラポジや居眠りなどで運転に復帰できないと判断されても解除され、運転復帰しなければ減速しながら左車線に移動して、その後に停車する。
解除には事前警告が発せられるが、加減速の頻度や速度変化幅、前方の車線変更頻度等に注意して状況に応じて解除に備えるような使いこなしも必要だろう。車両側の管理についてもサングラスや手袋の着用、ルーフラックの装着や汚れなどでステアリングタッチセンサーやドライバーモニタリング、各種車外センサーが正常に機能しない場合は、作動不可もしくは解除される。ホンダセンシングエリートの視覚聴覚触覚を阻害してはならないわけだ。
密度の高い情報と広範囲の認識可能なセンシング機能がホンダセンシングエリートの要。システムのハードもソフトウェアも大幅にグレードアップされているが、100台限定では量産効果も期待できないし、そもそもリース契約限定なので所有権の移転もない。市販車というよりも、自動運転レベル3の実効性の磨き上げと、ノウハウ収得を目的としたモデル、実用モニター車というのが正しい。
また、どのような状況にあってもシステム側の瑕疵がない限り運用や事故の責任はドライバーが負わなければならない。責任の所在は自動運転技術では重要な問題であり、逆にいえばシステム側が責任を取れるカバーレンジの広さが性能あるいは実践力でもある。この辺りは試乗してみないと判断しかねるが、相当な実用性を確保したからこその実用化なのだろう。コスパはともかく運転支援の未来を予感させるモデルである。
最新技術を惜しみなく注いだ高度なシステムを採用
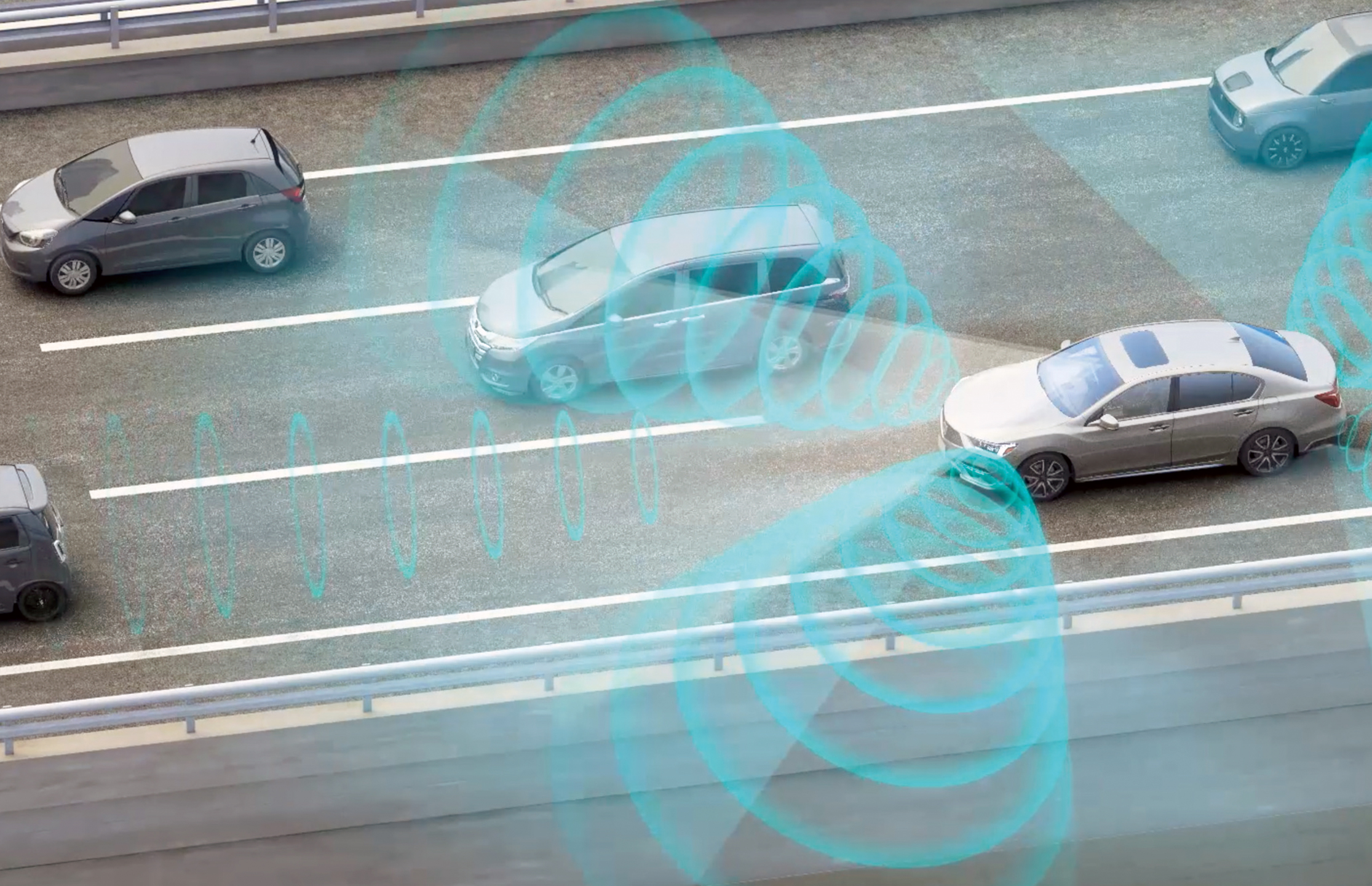
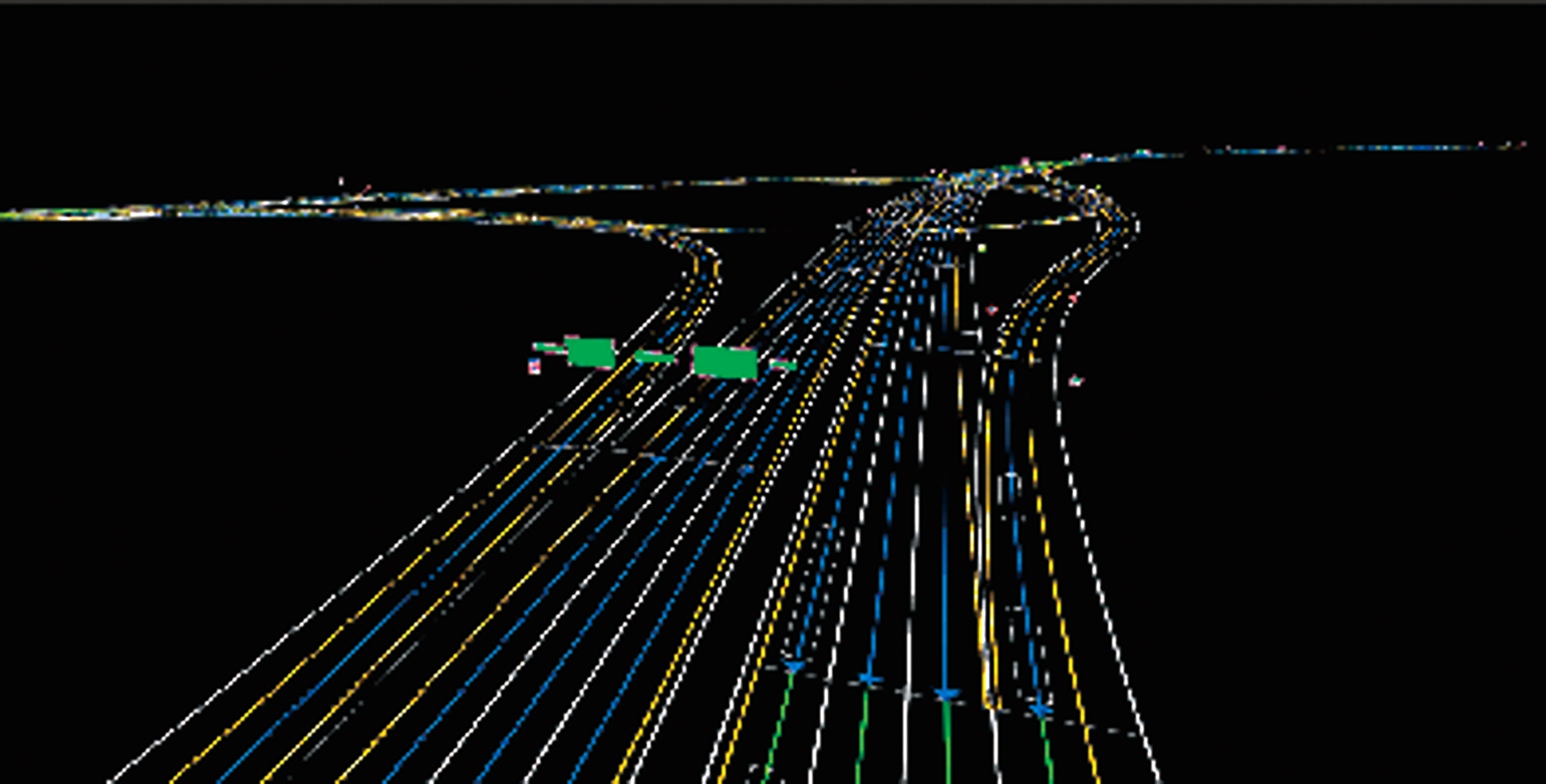
![]() 複数のカメラ/センサーにより全周囲をフルカバー
複数のカメラ/センサーにより全周囲をフルカバー

検知方式は、分解能に優れるライダーセンサー(LiDAR)と、雨天などの環境変化に強いミリ波レーダーセンサーを5台ずつ装着し、さらにフロントガラスに2台のカメラも配置される。
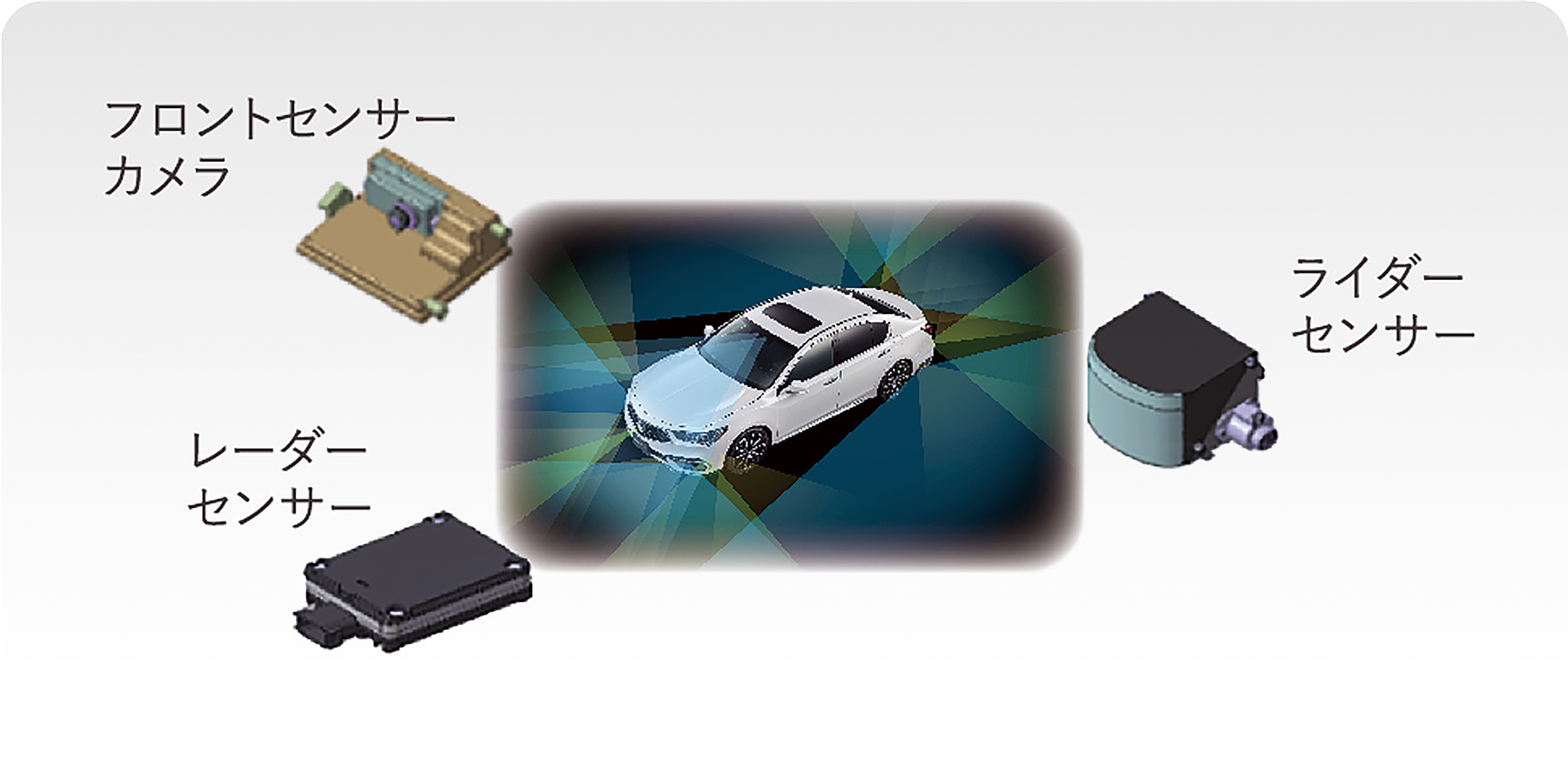
2つの種類が異なるセンサーとカメラから得られた情報をリアルタイムに認識。車線や車両/歩行者を含む、周辺との距離を把握することで高度な状況認識を実現している。
![]() 高精度地図と衛星からの信号でクルマの位置を認識
高精度地図と衛星からの信号でクルマの位置を認識
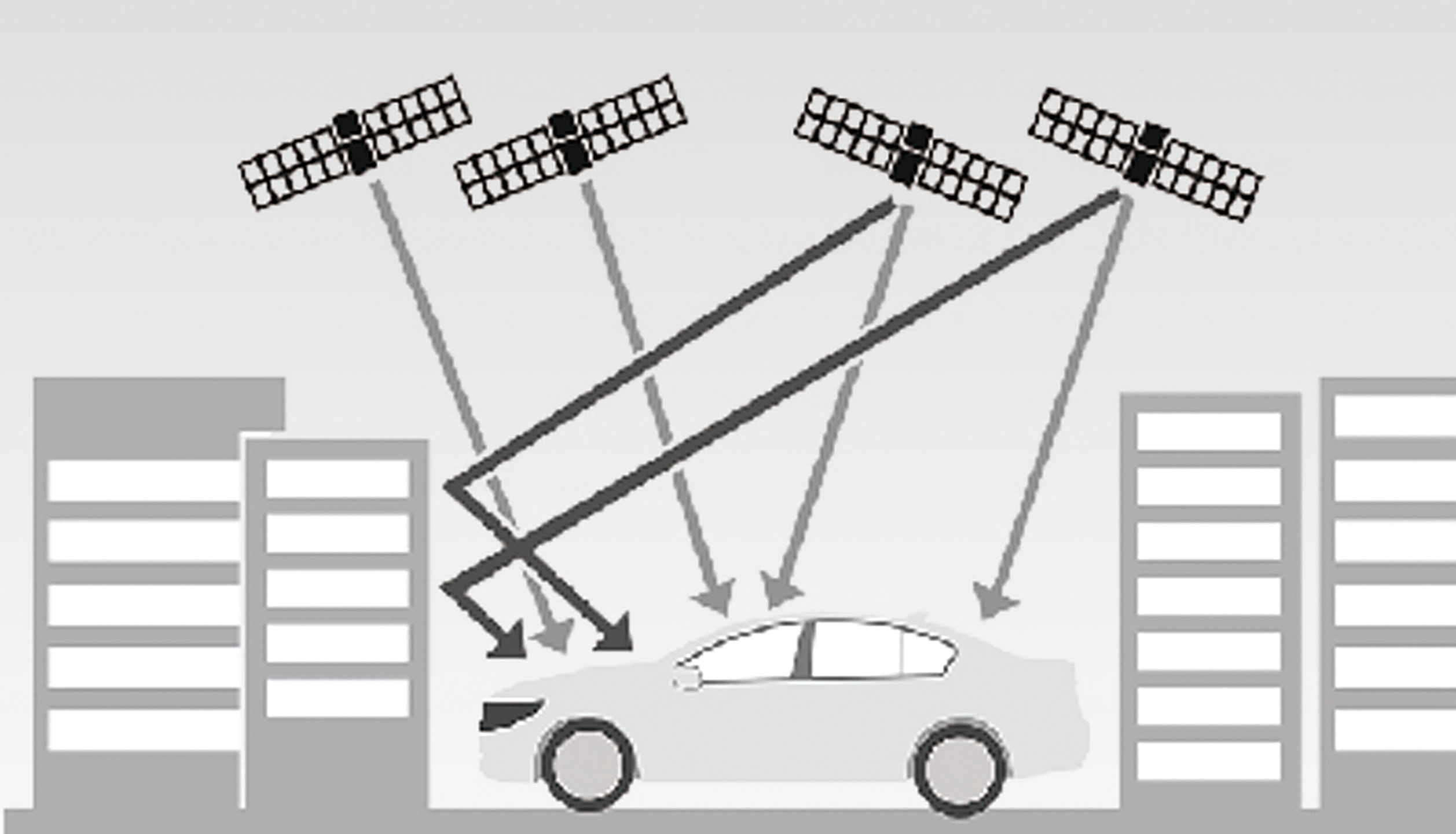
GPSや準天頂衛星などの複数の測位衛星から発信される信号を受信。三次元の高精度地図と組み合わせることで、高い精度の自車位置認識を実現している。
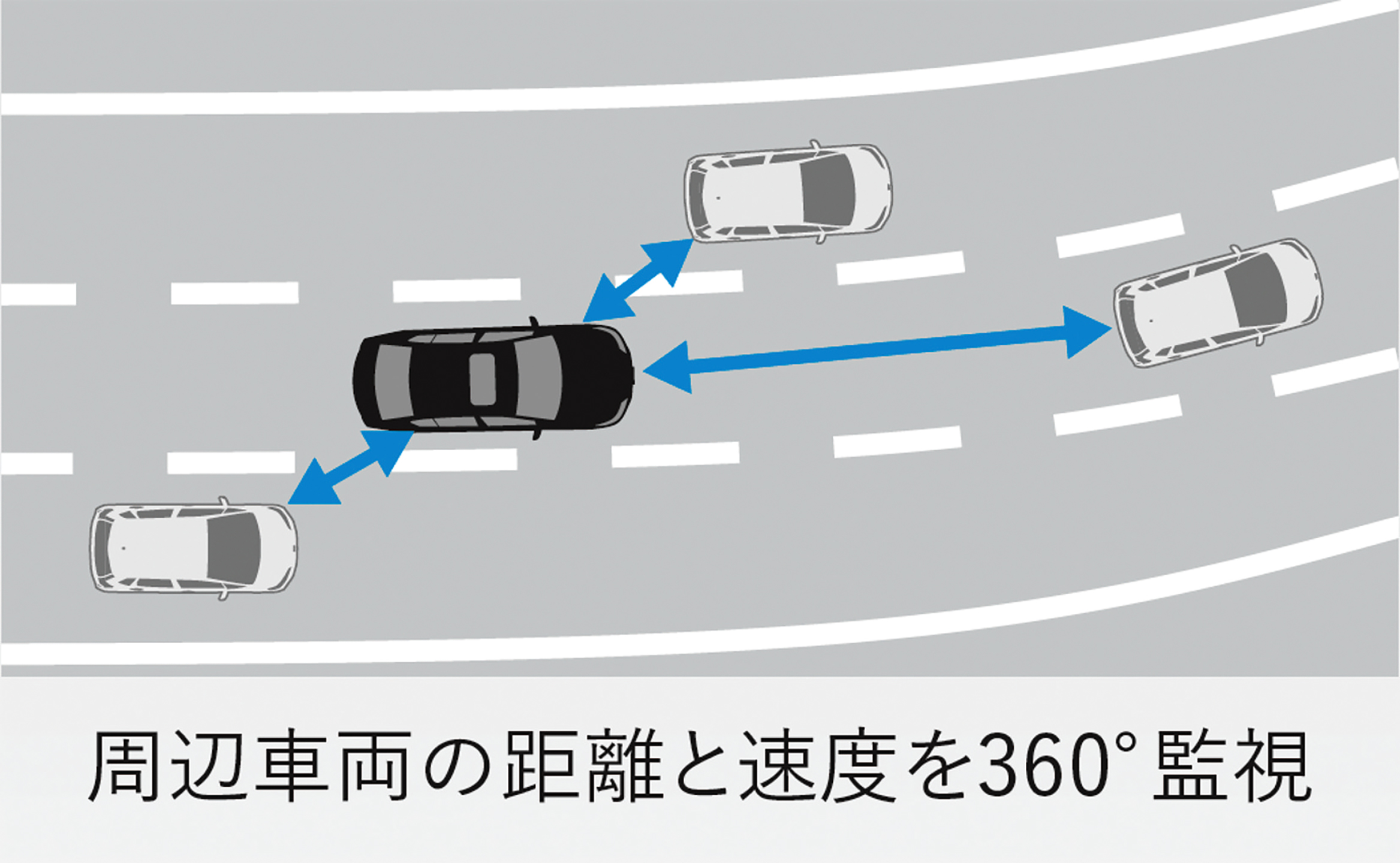
![]() メインECUの指示に基づき車両制御を行う
メインECUの指示に基づき車両制御を行う

ECUから命令される行動計画に基づき、アクセルやブレーキ、ステアリングを制御。手動運転と同レベルの、自然かつ滑らかな走りを実現する。
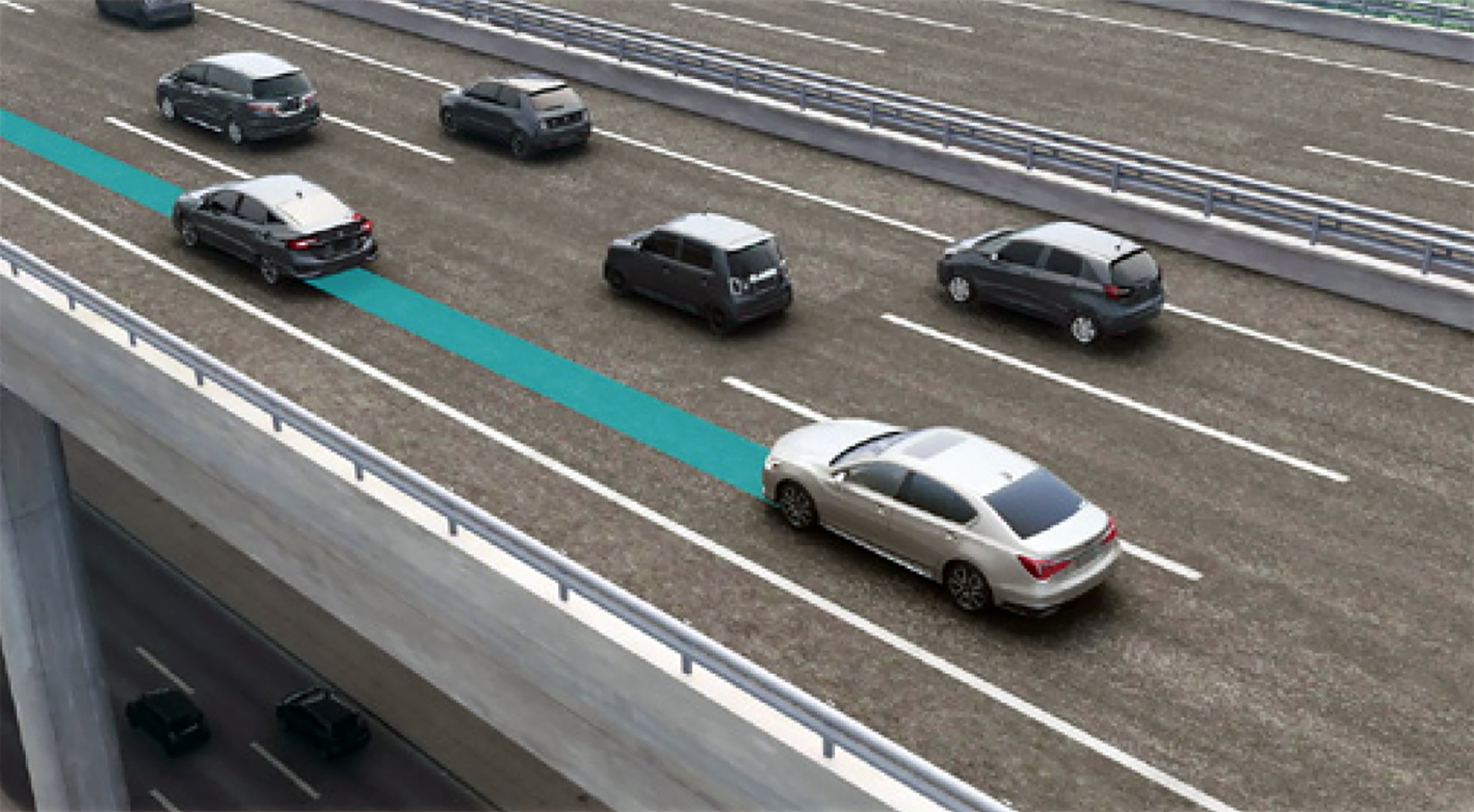
![]() メインECUが適切な走行ラインを決定
メインECUが適切な走行ラインを決定
センサー/カメラが検知した情報をもとに、車両搭載のメインECUが適切な走行ラインを素早く判断。周辺車両の動きも考慮しながら適切な行動計画が策定される。
ライタープロフィール
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
1977年の中古車情報誌GOOの創刊以来、中古車関連記事・最新ニュース・人気車の試乗インプレなど様々な記事を制作している、中古車に関してのプロ集団です。
グーネットでは軽自動車から高級輸入車まで中古車購入に関する、おすすめの情報を幅広く掲載しておりますので、皆さまの中古車の選び方や購入に関する不安を長年の実績や知見で解消していきたいと考えております。
また、最新情報としてトヨタなどのメーカー発表やBMWなどの海外メーカーのプレス発表を翻訳してお届けします。
誌面が主の時代から培った、豊富な中古車情報や中古車購入の知識・車そのものの知見を活かして、皆さまの快適なカーライフをサポートさせて頂きます。
![]() SHARE
SHARE
![]() SHARE
SHARE