故障・修理
更新日:2019.07.10 / 掲載日:2019.07.10
4WDの仕組み・メカニズム
“ジープ”に代表されるように、一時代の4WDは悪路走行を主目的としたものだった。しかし現在ではオンロード主体の4WDとなり、駆動システムや差動システムに様々なメカニズムが取り入れられている。
4つのタイヤを駆動する4WDにも様々な種類がある。パートタイム4WD、オンデマンド4WD、フルタイム4WD、アクティブトルクスプリット4WDの4種に大きく分類できるが、それぞれの方式の中で、さらに動力分配機構やセンターデフにも違いがある。また、FR車をベースにしたものとFF車をベースにしたもの、縦置きエンジン、横置きエンジンなどによっても分類できる。4WDの代表車、”ジープ”のイメージとは大きく変わり、現代の4WD車は様々なメカニズムによって成り立っている。
ここでは、それぞれの4WDの駆動方式の紹介と、その仕組みやメカニズムについて解説します。
その名のとおり、通常は2WDで走行し、必要な時に4WDを選択できる仕組みになっている。ジープをはじめとする初期の軍用車、オフロード用の4WDの多くがこの方式を採用していた。基本形はFR車をベースにし、トランスミッションの後部に動力分配機構であるトランスファーを配置し、そこからフロントへプロペラシャフトを延ばしている。
ディファレンシャルは後車軸と前車軸にあり、左右タイヤの作動を吸収するが、前後の回転差を吸収するディファレンシャルはない。このため、4WDにしたまま、半径の小さい旋回をすると、前輪と後輪の軌跡の差から、どちらか一方の接地性の高いタイヤの回転の影響を受ける。例えば、前輪の接地性が高い場合は、後輪がその影響を受け、ブレーキング現象が発生するし、後輪の接地性が高い場合は、前輪がスリップ現象を起こす。
回転半径が小さいと顕著な障害が現れるが、回転半径が大きくても、常に回転差はつきまとうので、4WDの状態では駆動力をロスする。このため、平坦路の通常の走行は2WDで、スリップしやすいグラベルや悪路では4WDに切り替える。現在この方式は、スズキ・ジムニーに採用されている。トランスファーにはチェーン式が用いられ、2WD、4WDの切り替えはシフトレバーではなく、スイッチで行われる仕組みになっている。
オンデマンド4WDの仕組み・メカニズム
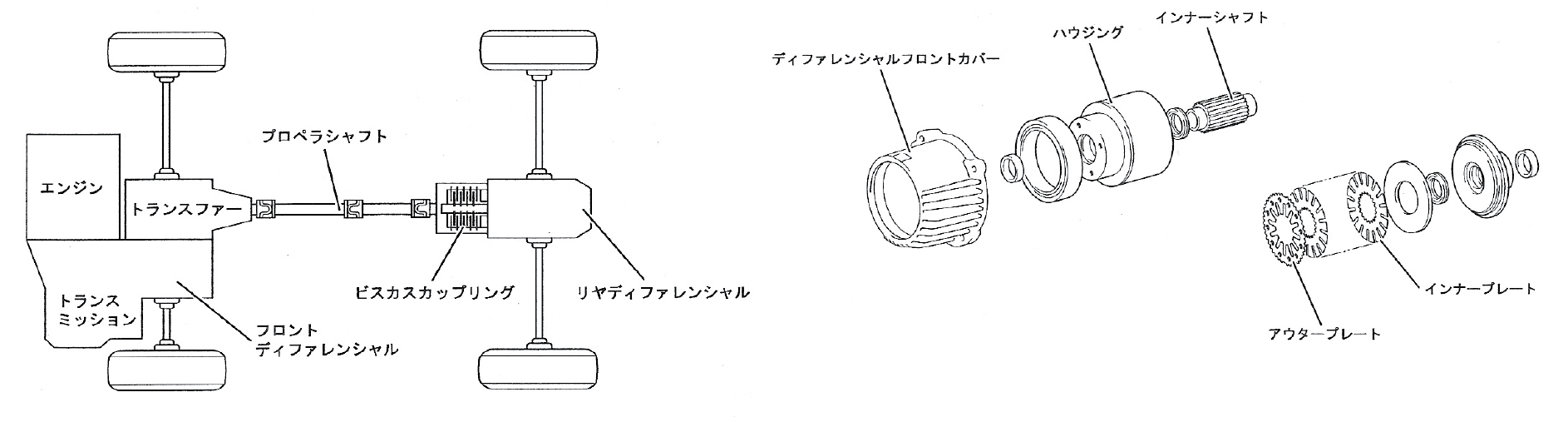 ビスカスカップリング方式の4WD。FF車をベースとしたものはリヤデフの直前にレイアウトされる例が多い。シンプルな構造でコストも低いことから軽自動車にも多く採用されている。
ビスカスカップリング方式の4WD。FF車をベースとしたものはリヤデフの直前にレイアウトされる例が多い。シンプルな構造でコストも低いことから軽自動車にも多く採用されている。 通常は2WDで走行し、要求のあった時にだけ自動的に4WDに切り替わるのがオンデマンドタイプの4WDだ。多くはFF車をベースにし、駆動輪がスリップして、従駆動輪との間に回転差が生じると、自動的に4WDに切り替わる。動力分配の方法はビスカスカップリング式、トルクセンシングデフ方式、デュアルポンプ方式の3種に大別することができる。
・ビスカスカップリング式
ハウジングに複数のプレートを内蔵し、シリコンオイルを充填したのがビスカスカップリングだ。向かい合うプレートの一方はトランスミッション側からのドライブシャフトの回転を伝えるハウジングの内周とスプライン嵌合し、もう一方のインナープレートは被駆動輪側の駆動シャフトとスプライン嵌合している。 駆動輪が滑りやすい路面で空転すると、従駆動輪との間に回転差が生まれ、向かい合うプレートにも同様な回転差が伝わる。ハウジングの中が空間であれば、プレートは抵抗なく、互いに回転するだけだが、粘度の高いシリコンオイルが充填されているため、これを剪断する抵抗が生じる。この抵抗が被駆動側のプレートを回転させ、駆動力が被駆動輪に伝わる、というのがビスカスカップリングの動力伝達メカニズムで、液体クラッチともいえる。
プレートの枚数、スリットの形状、サイズ、オイルの粘度によって伝達特性を変えることができ、車種に合わせてチューニングされる。国産で最初に採用したパルサーでは外径110mmのプレートを61枚用い、250rpmの回転差で15kg-mのトルクを伝達した。
ビスカスカップリングは動力伝達機能を持つが、前後のLSD、センターデフ、そしてデフロックとしての機能も併せ持つ。旋回時には前後輪の回転差を吸収し、4輪駆動時の回転差が大きくなるとハウジング内のシリコンオイルの温度が上昇し、それに伴う膨張によってハウジング内の圧力が上昇し、アウタープレートとインナープレートが圧着され、最終的には直結状態になる。
フロントのトランスファーの後ろに設置される例もあるが、最近のクルマの多くはリヤデフの前に設置する。コンパクトなハウジングの中にいくつもの機能を組み込み、しかも、低い回転差から効きを示し、さらにそれが最大効果を示すまで滑らかな特性が持続する。ビスカスカップリングはまた左右輪のLSDとしても用いられ、センタービスカスカップリングと組み合わせることで優れた走行性を示す。
オンデマンドのバリエーションとして、トヨタではロータリーブレード式カップリング、三菱はハイドロカップリングを採用していた時期があったが、この方式は現在では少数派となっている。
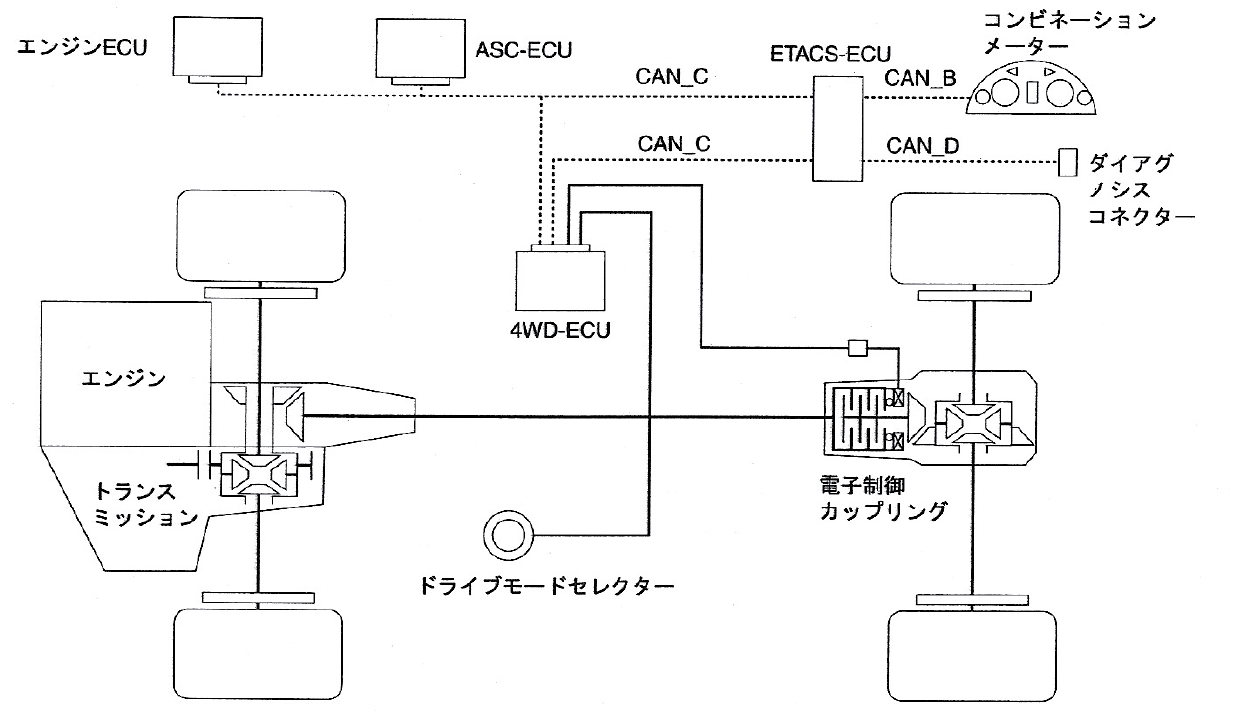
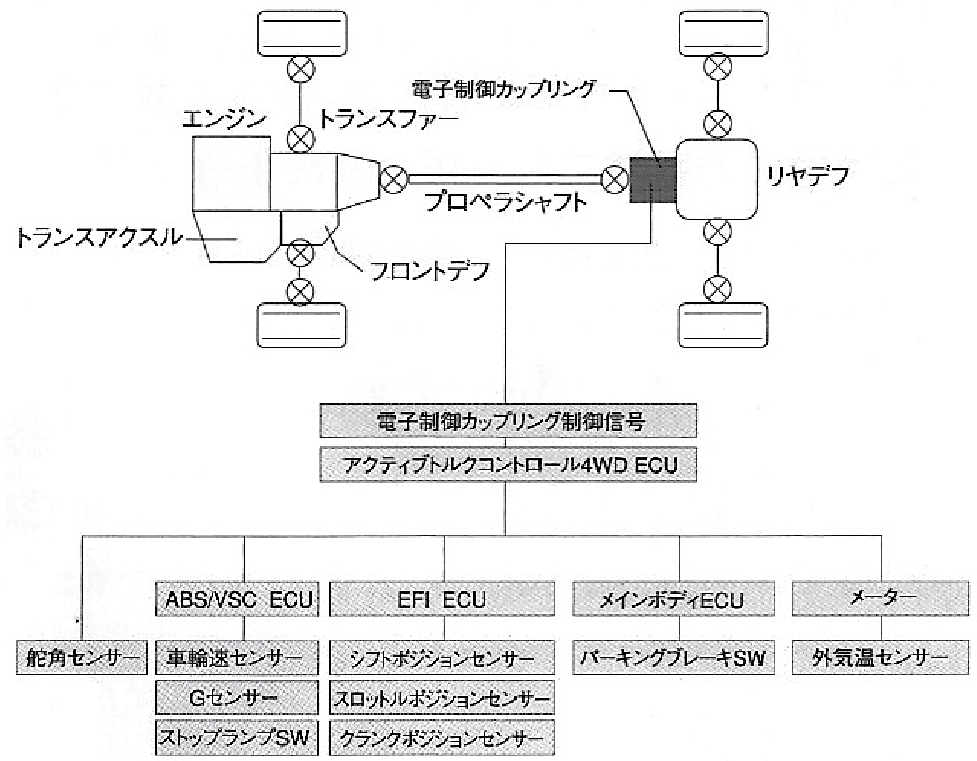
横置きエンジンFFをベースにしたトルクスプリット方式の4WD。横置きトランスミッションの後部にトランスファーが設けられ、そこからブロペラシャフトで動力が後輪に伝えられる仕組みになっている。電子制御カップリングは後車軸デフの前に一体にとなってセットされる。全てがセンサーからの情報を基に電子制御される。
・デュアルポンプ式
ホンダが採用しているのがデュアルポンプ式のオンデマンド4WD。駆動軸に接続されたハウジングの中に多板プレートが内蔵され、それに並列に、従駆動軸に接続されるプレートが交互にセットされる。ここまでの構造はビスカスカップリングと基本的に同じだ。ホンダではハウジングと一体になったプレートをメインクラッチ、従駆動軸につながるプレートユニットをクラッチハブと呼称している。ユニットはリヤデフと一体になったもので、コンパクトに仕上げられている。
クラッチハブの後部には鋼球によってクラッチハブ側に押し出されるカムと油圧によってクラッチハブ側に押し出されるピストンが直列でセットされる。ピストンはパイプによってフロントポンプとリヤポンプから合流した吐出口に繋がっている。フロントポンプは駆動軸の回転によって油圧を発生し、リヤポンプは従駆動軸の回転によって油圧を発生する。駆動力の分配は以下のように行われる。
定速走行時
駆動軸と従駆動軸の回転が同じため、カム部分にもオイルポンプにも位相に伴う力は発生しない。そのため、カムによるクラッチの圧着はない。さらにフロントポンプで発生した油圧はリヤポンプに送られるが、それがそのままフロントポンプに循環する。このサイクルを繰り返すため、常に流量は一定で、ピストンを動かす油圧は発生しない。このため、クラッチは開いたままで、従駆動軸に動力は伝わらず2WD走行となる。
スリップの少ない発進/加速時
わずかに前後の回転差が発生すると、鋼球を間に挟んだカムの動きによってクラッチハブがメインクラッチに押しつけられる。カムが開くメカニズムは多板式LSDのそれと酷似したきわめてシンプルな原理によるものだ。効きは速く、タイムラグのない駆動配分が行われる。加速が終わり、前後の回転差が解消されるとカムは元の位置に戻り、クラッチの圧着も解消され、2WDに戻る。
スリップの多い急加速/低ミュー路
カムの働きによる従駆動軸への駆動力配分に続き、デュアルポンプの働きによってクラッチピストンが作動し、さらにクラッチの圧着力を強め、多くの駆動力を従駆動軸に配分する。 前後の大きな回転差によって、フロントポンプの吐出量は増え、リヤポンプの吐出量との間に差が発生する。循環させても発生した差の部分は解消できず、これがチェックバルブを経由してオリフィスで調圧され、ピストンを押す力に変換される。前輪が激しく空転するなど、前後の回転がさらに大きくなると、ポンプの吐出量のバランスが崩れ、高圧となり、トラブルの発生原因となる。これを防止するために、リリーフバルブが設けられ、規定圧力に達すると開き、一定の油圧に保持。
4WDの場合、4輪が同一回転に固定される状況が発生する。このような場合、4輪の回転差を検知して作動するABSの働きが阻害される。これを抑制するために、デュアルポンプ式では、前輪減速時には、リヤオイルポンプの吐出をフロントオイルポンプに回さず、リヤだけで循環させ、2WD状態に保持する機能も組み込まれている。
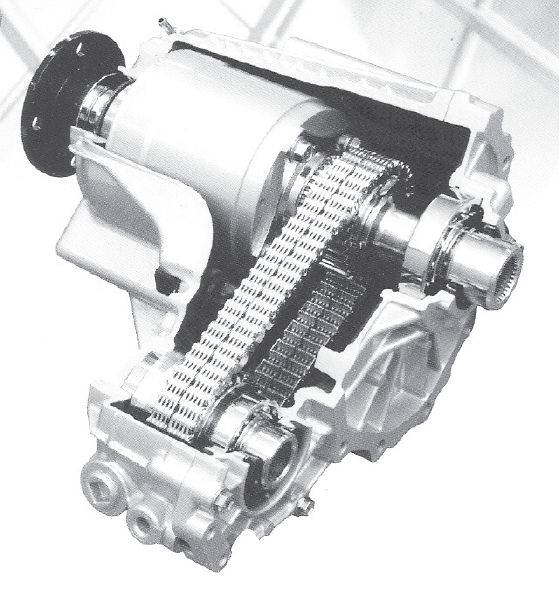
FR車をベースにしたアクティブトルクスプリット方式4WDのレイアウト。トランスミッション後部に動力を引き出すトランスファーが設けられ、前輪へ駆動力を配分する。トランスファーには電子制御多板クラッチが内蔵される。
フルタイム4WDの仕組み・メカニズム
 電子制御多板クラッチの構造。ソレノイドによってクラッチの圧着が制御され、トルク配分を路面の状況に合わせてコントロールする。
電子制御多板クラッチの構造。ソレノイドによってクラッチの圧着が制御され、トルク配分を路面の状況に合わせてコントロールする。 常に4輪に駆動力を伝えるのがフルタイム4WD。パートタイム4WDを4WD状態にしたのと基本的に同じ形態だが、大きな相異点が一つある。それがセンターデフの有無。前後の車輪の回転差によるブレーキング現象を解消するために前後の駆動軸の間にディファレンシャル機構が組み込まれている。働きは通常の左右間のディファレンシャルとまったく同じで、回転半径の小さい旋回でも前後差を解消し、常に4WDで走行してもブレーキング現象という負の影響を受けずに済む。
センターデフとして機能を発揮するのはベベルギヤ、ウオームギヤ、プラネタリーギヤの3種だが、それぞれに特徴がある。2WD用のディファレンシャルと同じベベルギヤは、その構造から、駆動力を均等に配分する。駆動配分を前後で50対50にする場合はベベルギヤを選択する。プラネタリーギヤは入力軸と出力軸の選択によって、駆動力を自由に配分できるという大きな特徴を持っている。例えば前輪に30%、後輪に70%の駆動配分をする場合は、各ギヤの歯数をそれに合わせて設定し、プラネタリーキャリアに入力し、サンギヤからの出力を前輪の駆動力に、そしてリングギヤからの出力を後輪に配分すればいい。ギヤ比の設定によって、駆動配分の自由度は大きい。
センターデフは、このようにフルタイム4WDにとって必須のデバイスなのだが、欠点も抱えている。それは通常の左右ディファレンシャルと同じように、一方のタイヤが空転すると、もう一方のタイヤに駆動力が伝わらないことだ。4WDの場合、前、あるいは後ろにある駆動軸につながるタイヤのどれかが空転すると、他の3輪には駆動力が伝わらなくなってしまう。
この弊害を抑制するためのデバイスがセンターデフ用のLSDで、ビスカスカップリングや電子制御多板クラッチが用いられる。ビスカスカップリングは、パッシブ制御となるが、LSD機能の他に、ビスカスカップリング式4WDと同じように、自動駆動力配分機能も発揮する。電子制御多板クラッチは、走行状態に応じて、積極的に作動制御することが可能になる。ヘビーデューティなSUVではLSDとしても加え、スイッチで操作できるセンターデフロックを備えるクルマもある。
LSD機能を併せ持ったセンターデフを採用する例もある。それがトルクセンシングデフだ。駆動力配分機能、差動機能、差動制限機能の3つを一つのユニットに収めたもので、効率のいい方式といえる。基本形はプラネタリーギヤで、全てのギヤがヘリカルギヤになっている。
ヘリカルギヤの特徴は噛み合うギヤとギヤの間に抵抗が発生すると、スラスト方向に力が発生することだ。前後の駆動輪に大きな回転差が発生すると、スラスト力が生まれ、ギヤをスラストワッシャーに押しつけ、差動制限効果を発揮する。またギヤの歯と歯の間でも摩擦力が発生し、それも差動制限のためのエネルギーとなる。
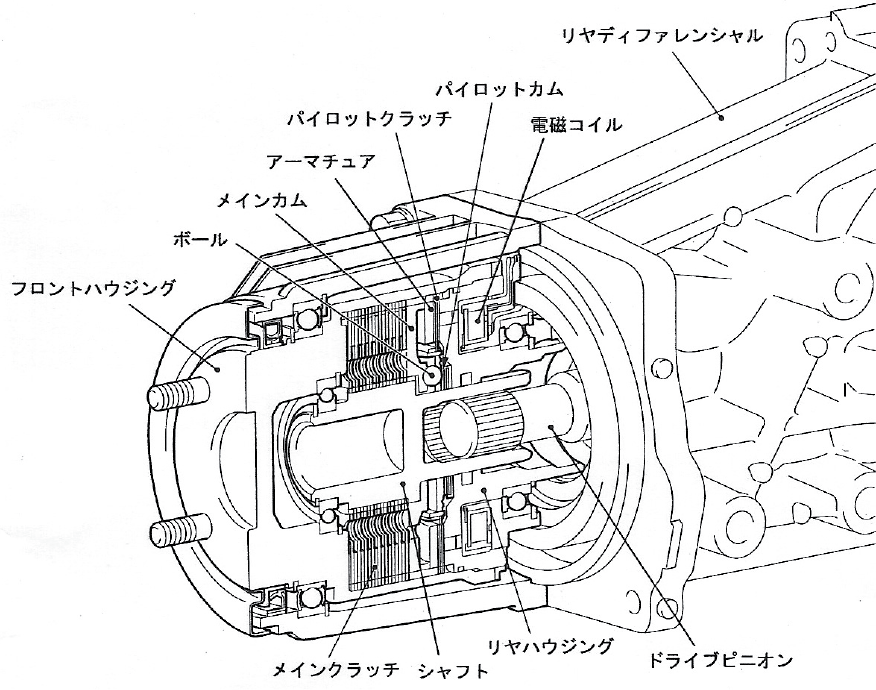
アクティブトルクスプリット4WDの仕組み・メカニズム
多板クラッチの圧着を電子制御し、走行状態に応じて、前後に適正な駆動力を配分するのがアクティブトルクスプリット型の4WDだ。ギヤ式のセンターデフが、ギヤの歯数に従った比率でしか駆動力を前後に配分できないのに対し、この方式では駆動側100、従駆動側0から、50:50までの間で自由に配分できるというのが大きな特徴だ。多くのメーカーで採用されているが、制御の方法が異なるだけで、駆動配分の基本メカニズムは共通している。
ハウジングは駆動シャフトに直結され、駆動シャフトと同じ回転を行う。ハウジングの内部には、それと一体になって回転する複数のメインクラッチとパイロットクラッチがあり、それと交互に向かい合い、従駆動軸につながるクラッチがセットされている。ここまでのメカニズムはビスカスカップリングのそれと酷似している。
パイロットクラッチは、メーカーによって呼称が異なり、コントロールクラッチとも言われるが、いずれも機能は同じで、電磁コイルと一体になったアーマチャ(回転子)の動きを受け止め、パイロットカムを作動させる。この方式を採用するのは主にFRをベースにした車両で、縦置きトランスミッションの後部にユニットを組み込んだトランスファーを配置し、そこから前輪を駆動するためのプロペラシャフトを分岐している。また横置きエンジンのFF車をベースにしたものでは、クラッチユニットはリヤディファレンシャルの前に設置される。駆動配分は以下のように行われる。
・0:100の場合各車輪に設けられた車輪速度センサーからの情報を基に、前後のタイヤに回転差が生じていない状態では、クラッチの圧着は行われず、主駆動輪だけにトルクが配分される。FR車ベースの場合は後輪駆動となり、FF車ベースの車両は前輪駆動となる。クラッチはセンターデフの役割も持ち、タイトターンでのブレーキング現象も吸収する。
・50:50の場合主駆動輪が大きく空転し、従駆動輪との間に回転差が生じると、車輪速度センサーがそれを検知し、コントロールコンピューターに情報を送る。コンピューターからの指令に基づき、クラッチが最大に圧着され、駆動力が従駆動輪に最大に伝達される。制御のための情報にはエンジン回転数、スロットルペダル開度も用いられるし、エンジントルクから車速加速度を検出するものもある。
・中間域での制御50:50の駆動配分は氷上や雪道などの滑りやすい路面での制御で、通常の走行では0:100の間で、常に最適な駆動力が得られるように制御が行われる。
FF車をベースにしたアクティブトルクスプリット方式4WDのレイアウト。電子制御多板クラッチはリヤデフの直前に一体になって設置される。図は縦置きエンジンのものだが、横置きエンジンでも基本的に同じレイアウトを採用する。
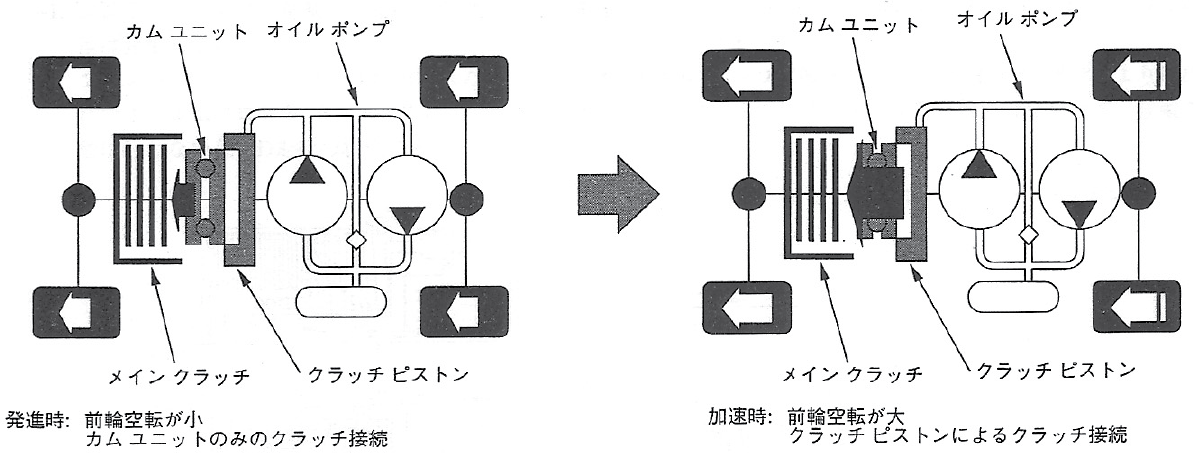
ホンダが採用するデュアルポンプ式4WDの作動図。前後輪の回点差が生じるとポンプが稼働し、油圧を発生させる。回転差が小さい時はレスポンスの速いカムのみでクラッチを接続させ、回転差が大きくなるとクラッチピストンにバトンタッチし、強い力でクラッチを接続する。
e-4WDの仕組み・メカニズム
主駆動輪をエンジンで回し、従駆動輪をモーターで駆動する電動式4WDも少数ながら存在する。日産が3代目マーチに搭載するのがe-4WD、トヨタがエスティマ、ハリアーなどに採用しているのがE-Four。e-4WDは、モーター、クラッチ、減速ギヤで構成される後輪駆動ユニットと、モーターを駆動するための電源である専用ジェネレーター、そして4WDコントロールユニットからなっている。
通常は2WDで走行し、前輪がスリップするとクラッチが接続され、エンジンに接続されたジェネレーターが発電を行い、モーターが起動して後輪を駆動する。2WD、4WD選択スイッチも備わり、常に2WDで走行することも可能だ。
E-Fourは50kW、130Nmのコンパクトなモータージェネレーターをリヤディファレンシャルの前に設置してある。スキッドコントロールコンピューターがセンサーからの情報を基に、滑りやすい路面からの発進時に、最適な駆動に必要な前後駆動トルク配分を算出し、駆動力を前後に適切に配分する。
通常走行時はモータージェネレーターは休止し、滑りやすい路面での旋回や加速時には自動的に起動し、前後のトルク配分を最適にする。
同じハイブリッドでもレクサスLS600hに採用されているのはフルタイム4WDで、トルクセンシングセンターデフを用い、通常の走行では駆動力配分を前40%、後ろ60%にし、走行状態に応じて50:50、または30:70の二つのパターンを瞬時に選択する。
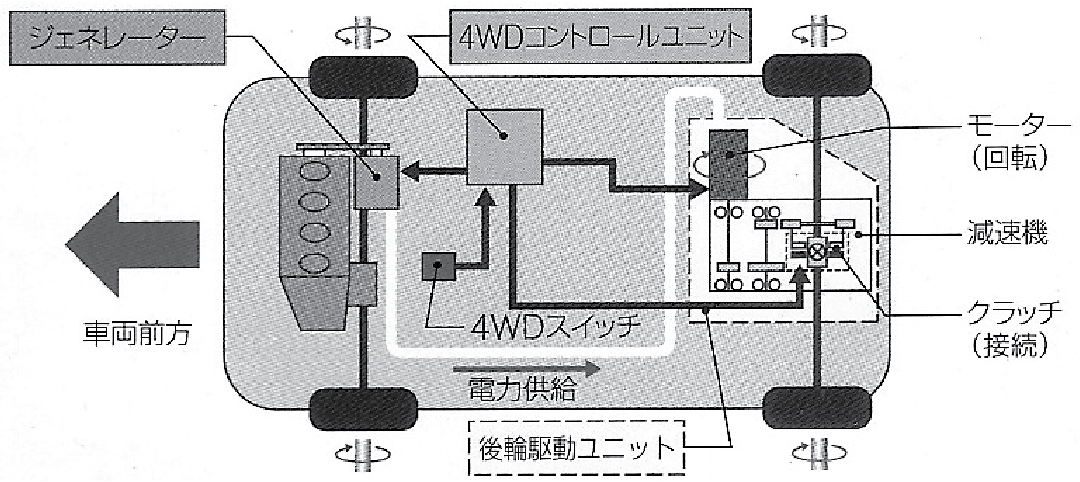
3代目ニッサン・マーチに採用されるe-4WD。モーター、クラッチ、減速機からなり、それが後輪に接続される。通常はガソリンエンジンのFFとして走り、後輪がスリップするとモーターがアシストする。簡易ハイブリッドととらえることもできる。
最新4WDのメカニズム
かつては特殊なメカニズムだった4WDも、今ではファミリーユースのクルマや軽自動車に採用され、さらにハイパフォーマンス車を効率よく、安全に走らせるために、なくてはならないシステムとなっている。
4輪を駆動しながら、さらに主駆動輪へのトルクを左右で制御する。4WDの進化は悪路や滑りやすい路面でのグリップ能力の向上から、平坦路での操縦性の向上にも及んでいる。また駆動力配分制御がトラクションコントロールやスタビリティコントロールと統合制御され、高出力車を効率よく、安全に走らせられるようにもなっている。
左右駆動力配分制御は1996年にミツビシ・ランサーエボリューションXに世界で初めて採用されたもので、同時期にホンダはプレリュードをベースにFFで左右駆動力配分システムを研究し、それを4WDにも広げていた。このようなシステムを採用した市販車にはパイオニアであるランサーエボリューション、ホンダ・レジェンドをはじめ、ニッサンGT-R、BMW X6などがある。
ミツビシAYCの仕組み・メカニズム
リヤディファレンシャル内に油圧多板クラッチを主にした左右トルク移動機構が設けられている。クラッチの圧着力を電子制御することによって、前後のアクティブトルクスプリットと同様に、後輪の左右への駆動力を制御できる。
走行状態に応じて、左右の駆動トルク差をコントロールすることで、クルマに回転方向への力を発生させ、ステアリングでの回頭力と合わせて、安定した操縦性を導き出す。初期のAYCのディファレンシャルギヤにはベベルギヤが用いられていたが、2003年からプラネタリーギヤに変えられ、スーパーAYCへと進化している。
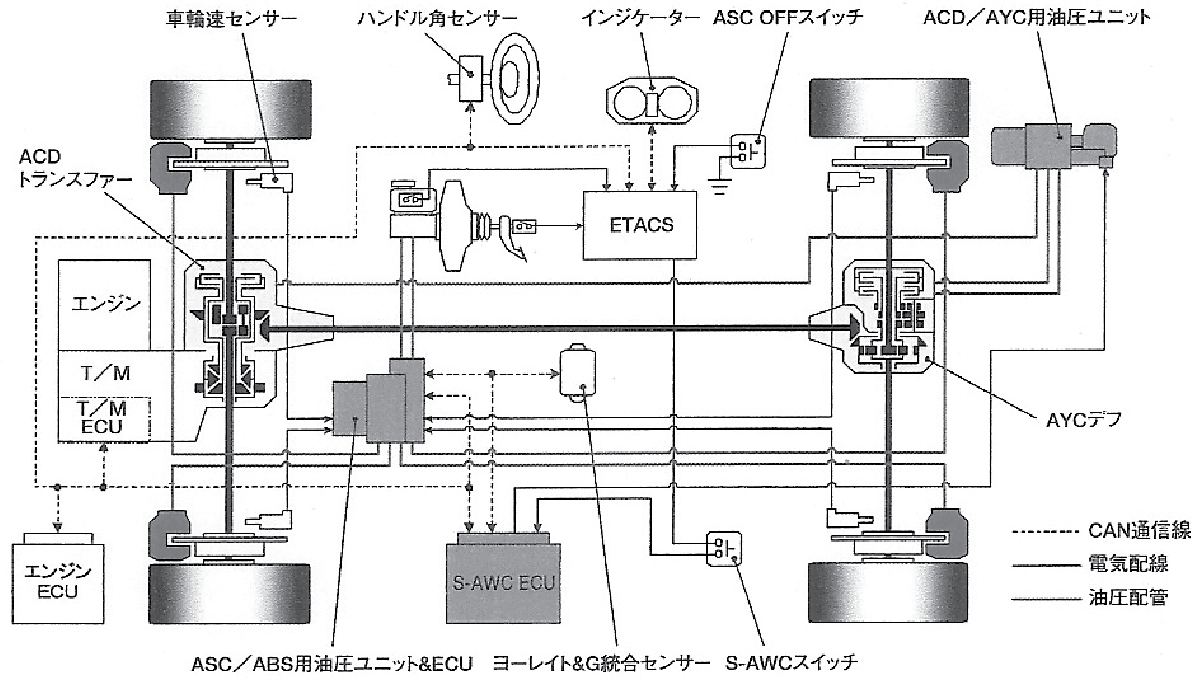
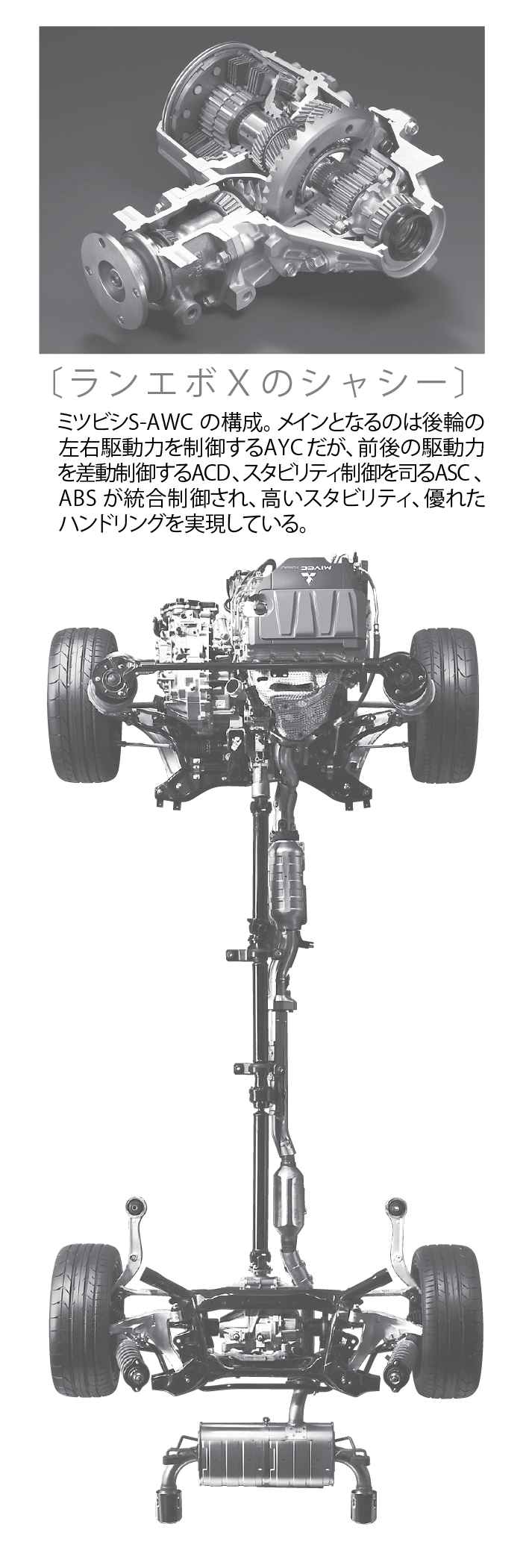
AYCを核にそれを熟成してランサーエボリューションに採用されたのがS-AWC(Super All Wheel Control)。AYC(Active Yaw Control)、ACD(Active Center Differential)に加えてアクティブスタビリティコントロール、ABS、エンジン、トランスミッションなどの電子制御デバイスを一体的にコントロールする。いわば究極のオールホイールコントロールとでもいうべきものだ。
ABSやトラクションコントロールに始まった安定制御技術は4WDとの統合制御にまで進化し、ドライビングスキルのないドライバーでも安全に高性能を楽しめるようになったという意義は大きい。
ホンダSH-AWDの仕組み・メカニズム
レジェンドで実用化されている4輪駆動自在制御システムSH-AWD(Super Handling All-Wheel-Drive)は前後の駆動力配分の他に後輪の左右でも駆動力が、走行状態に応じて自動配分される。コーナリング中は外側後輪に大きな駆動力を配分し、車両を内側に向けるモーメントを発生させ、アンダーステアを減少させるほか、あらゆる運転域で車両を安定させる方向で駆動力を配分する。配分は前後で30%から70%の間、後輪の左右では0%から100%の間で行われる。
これらの全てのコントロールがリヤアクスルにセットされた左右2対の電磁多板クラッチで行われる。クラッチの断続は横Gセンサー、前後Gセンサー、ヨーレイトセンサー、車輪速度センサー、舵角センサー、エンジン/トランスミッションECUからの信号を元に、電磁石と磁性体間のギャップをモニターし、無段階で常に連続的に行われる。
SH-AWDのもう一つの特徴は後輪回転数増速機構を持つことだ。コーナリング中の外側後輪の軌跡は、前輪左右の平均軌跡より外側になる。このため、前後輪の回転数が同じだと、外側後輪が前輪回転数に追いつかず、動力伝達にロスを生じる。この弊害をなくするために、プラネタリーギヤを用いた増速機構で左右駆動力配分が最大限に活用される。駆動力と回転数をコントロールするSH-AWDは新世代の4WSととらえることもできる。
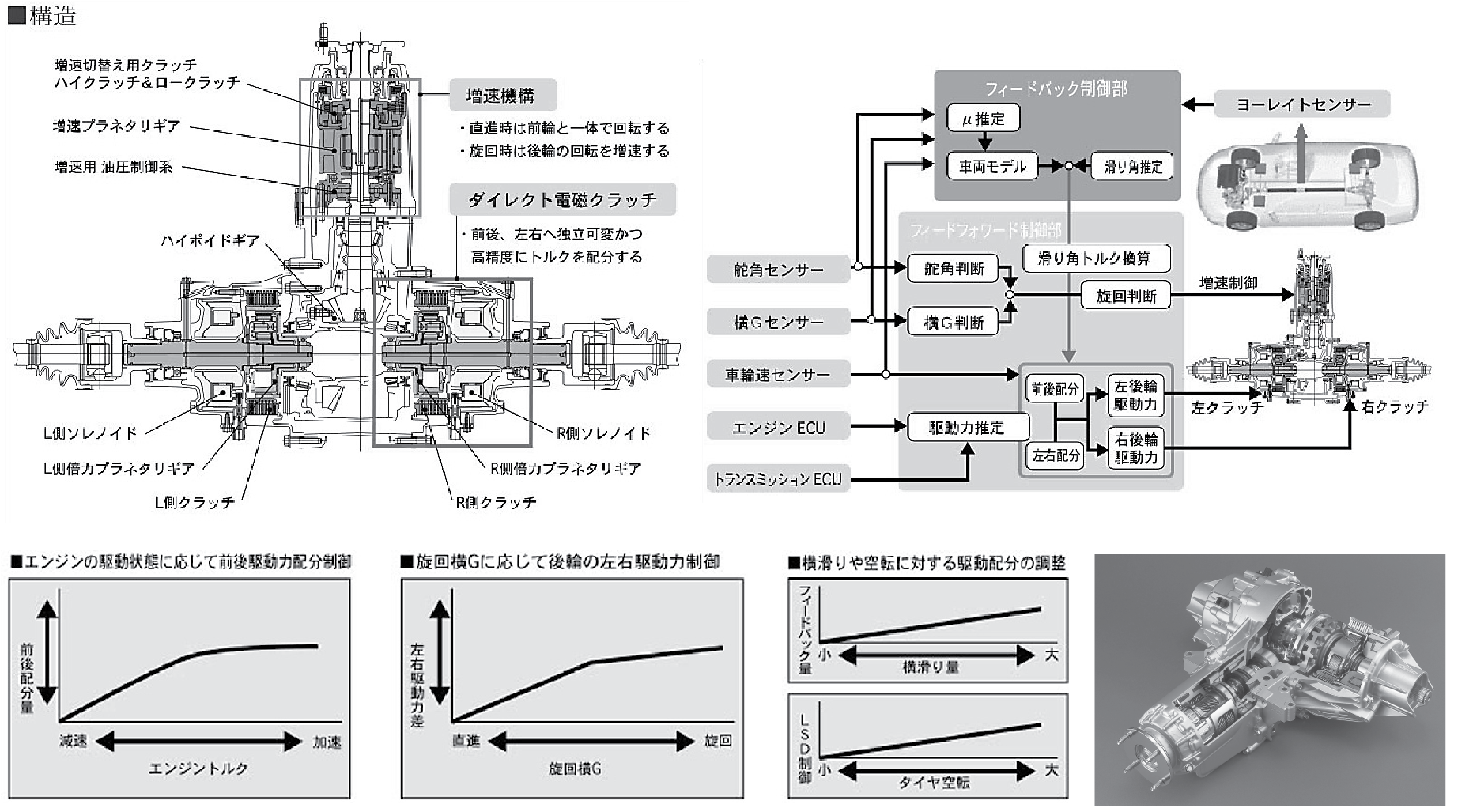
ホンダSH-AWDの構造。増速用プラネタリーギヤユニット、左右駆動軸用の電磁クラッチで構成される。後輪左右の駆動トルクを制御することでコーナリング性能を向上させ、またスタビリティ向上にも効果を発揮する。走行安定に関わる多数のセンサーからの情報を基に最適なトルクの配分が行われる。
ニッサンGT-Rの仕組み・メカニズム
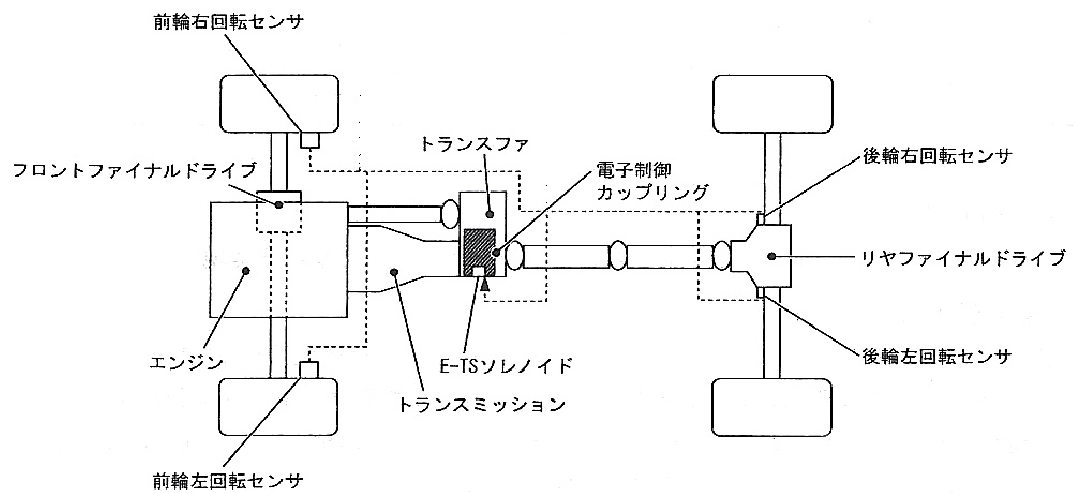
スーパーパフォーマンスを誇るニッサンGT-Rの4WDシステムは従来モデルから熟成されているアテーサE-TSが用いられている。しかしこのクルマの大きな特徴はクラッチ、トランスミッション、トランスファーがリヤディファレンシャルと一体になったトランスアクスル方式を採っていることだ。
前後の重量配分は操縦性に大きな影響を与える。一般に前が重いとアンダーステアに、後ろが重いとオーバーステアとなる。限られたサイズの中で、市販車は前後の重量配分で妥協を強いられるが、GT-Rのような特殊なクルマではそれのプライオリティが高く、このようなレイアウトが採用された。
メインのドライブシャフトはいったん後部のトランスアクスルに入り、ディファレンシャルを経由して左右のタイヤを駆動する。トランスアクスルからは、メインドライブシャフトと平行に長いドライブシャフトが前車軸のディファレンシャルまで延びる。トランスアクスル方式は過去にも採用例があるが、クラッチまでも一体にしたのは世界初の試みだ。
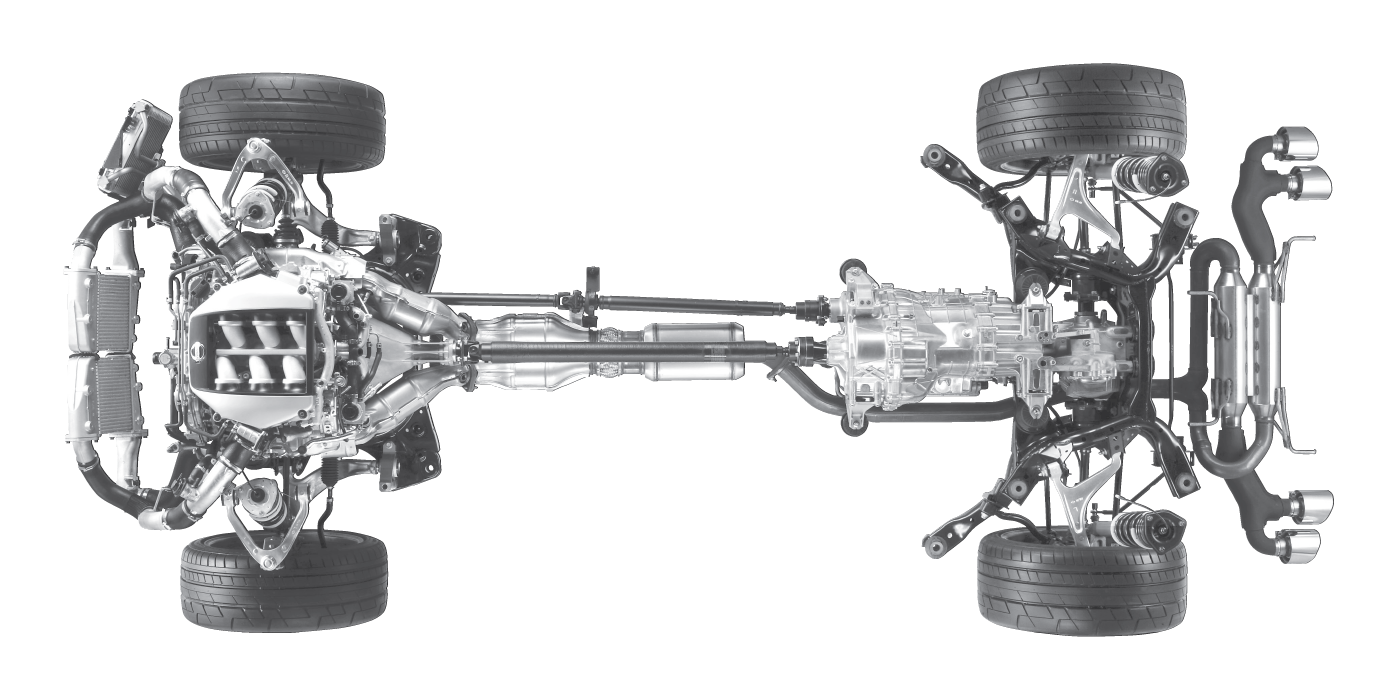
ニッサンGT-Rのパワートレーン。FRをベースにしたトルクスプリット方式の4WD。ユニークなのはトランスミッション、クラッチを後ろ車軸と一体にしたトランスアクスル方式を採ることだ。前輪の駆動は後部のトランスアクスルから延びたプロペラシャフトで行われる。